
 There have been lots of high-speed bio-inspired robots in recent years, as exemplified by Boston Dynamics WildCat. But MIT’s Cheetah robot, which made its big debut earlier this month, is in a class by itself. In addition to being able to run at impressive speeds, bound, and jump over obstacles, this particular biomimetic robot is also being battery-and-motor driven rather than by a gasoline engine and hydraulics, and can function untethered (i.e. not connected to a power source).
There have been lots of high-speed bio-inspired robots in recent years, as exemplified by Boston Dynamics WildCat. But MIT’s Cheetah robot, which made its big debut earlier this month, is in a class by itself. In addition to being able to run at impressive speeds, bound, and jump over obstacles, this particular biomimetic robot is also being battery-and-motor driven rather than by a gasoline engine and hydraulics, and can function untethered (i.e. not connected to a power source).
While gasoline-powered robots are still very much bio-inspired, they are dependent on sheer power to try and match the force and speed of their flesh-and-blood counterparts. They’re also pretty noisy, as the demonstration of the WildCat certainly showed (video below). MIT’s Cheetah takes the alternate route of applying less power but doing so more efficiently, more closely mimicking the musculoskeletal system of a living creature.
 This is not only a reversal on contemporary robotics, but a break from history. Historically, to make a robot run faster, engineers made the legs move faster. The alternative is to keep the same kind of frequency, but to push down harder at the ground with each step. As MIT’s Sangbae Kim explained:
This is not only a reversal on contemporary robotics, but a break from history. Historically, to make a robot run faster, engineers made the legs move faster. The alternative is to keep the same kind of frequency, but to push down harder at the ground with each step. As MIT’s Sangbae Kim explained:
Our robot can be silent and as efficient as animals. The only things you hear are the feet hitting the ground… Many sprinters, like Usain Bolt, don’t cycle their legs really fast. They actually increase their stride length by pushing downward harder and increasing their ground force, so they can fly more while keeping the same frequency.
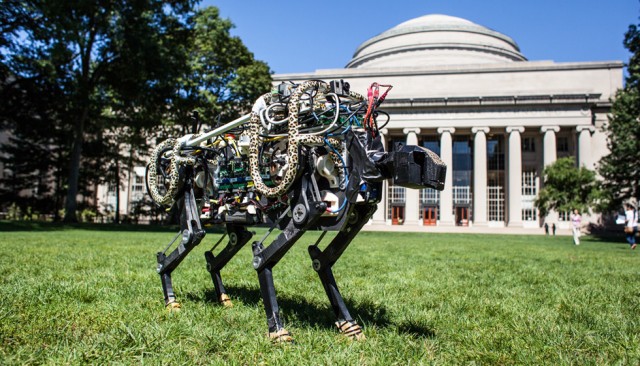
MIT’s Cheetah uses much the same approach as a sprinter, combining custom-designed high-torque-density electric motors made at MIT with amplifiers that control the motors (also a custom MIT job). These two technologies, combined with a bio-inspired leg, allow the Cheetah to apply exactly the right amount of force to successfully bound across the ground and navigate obstacles without falling over.
 When it wants to jump over an obstacle, it simply pushes down harder; and as you can see from the video below, the results speak for themselves. For now, the Cheetah can run untethered at around 16 km/h (10 mph) across grass, and hurdle over obstacles up to 33 centimeters high. The Cheetah currently bounds – a fairly simple gait where the front and rear legs move almost in unison – but galloping, where all four legs move asymmetrically, is the ultimate goal.
When it wants to jump over an obstacle, it simply pushes down harder; and as you can see from the video below, the results speak for themselves. For now, the Cheetah can run untethered at around 16 km/h (10 mph) across grass, and hurdle over obstacles up to 33 centimeters high. The Cheetah currently bounds – a fairly simple gait where the front and rear legs move almost in unison – but galloping, where all four legs move asymmetrically, is the ultimate goal.
With a new gait, and a little byte surgery to the control algorithms, MIT hopes that the current Cheetah can hit speeds of up to 48 km/h (30 mph), which would make it the fastest untethered quadruped robot in the world. While this is still a good deal slower than the real thing – real cheetah’s can run up to 60 km/h (37 mph) – it will certainly constitute another big step for biomimetics and robotics.
Be sure to check out the video of the Cheetah’s test, and see how it differs from the Boston Dynamics/DARPA’s WildCat’s tests from October of last year:
Source: extremetech.com

