
Some interesting forecasts for the coming year, regarding technology and how it will impact our lives.
Category: Technology
The Future is Here: The Pulse-Tech Car Stopper
 High-speed car chases could become a thing of the past, thanks to new technologies that are making unsafe driving a thing of the past. First, there was the joint project being developed by Emotiv and the Royal Automobile Club of Western Australia. Known as an “attention-powered car”, the driver of this vehicle wears a headset that measures their brainwaves and shuts down the engine in case of inattention.
High-speed car chases could become a thing of the past, thanks to new technologies that are making unsafe driving a thing of the past. First, there was the joint project being developed by Emotiv and the Royal Automobile Club of Western Australia. Known as an “attention-powered car”, the driver of this vehicle wears a headset that measures their brainwaves and shuts down the engine in case of inattention.
And now, there’s a technology being developed by UK’s E2V which could shut down cars from the other end. That is to say, a technology aimed at detecting speeding cars and stopping them by electronically neutralizing their systems. It’s known as the RF Safe Stop, a system that uses electromagnetic pulses to confuse the systems of car and force its engine to stall.
 According to the BBC, the technology has piqued the interest of the military and police:
According to the BBC, the technology has piqued the interest of the military and police:
In demonstrations seen by the BBC, a car drove towards the device at about 24km/h (15mph). As the vehicle entered the range of the RF Safe-Stop, its dashboard warning lights and dials behaved erratically, the engine stopped, and the car rolled gently to a halt. Digital audio and video recording devices in the vehicle were also affected.
There are concerns about the technology’s effects on electronic braking and steering systems, but EV2 says the risks are low. Because RF Safe-Stop works on electronic systems, it can also be effective on boats. If adopted, the technology could find its way into road stops and traffic points, where it could be used to target people breaking the speed limit and force their cars into a shutdown until police arrive.
 There are drawbacks, of course. Older vehicles, which are less dependent on electronic systems, will be immune to the Safe Stop’s signals. In this respect, low-tech trumps high-tech due to a lack of complexity. However, given the sheer proliferation of modern vehicles, and their growing dependence on electronic systems (and engines), the Safe Stop technology is likely to be adopted all across the UK in the coming years.
There are drawbacks, of course. Older vehicles, which are less dependent on electronic systems, will be immune to the Safe Stop’s signals. In this respect, low-tech trumps high-tech due to a lack of complexity. However, given the sheer proliferation of modern vehicles, and their growing dependence on electronic systems (and engines), the Safe Stop technology is likely to be adopted all across the UK in the coming years.
Looking farther down the road, its not unlikely that advanced traffic systems and countermeasures will be featured on highways and waterways all over the world. In addition to being able to monitor traffic patterns, read license plates and registries, and tag those of offenders, it will also be able to deploy a targeted EM burst on vehicles that are identified by police as criminals or possible terrorists, and stop them in their tracks.
 And of course, a militarized version of the technology is a no-brainer, given the military’s long-standing love affair with EM technology. Imagine, if you will, vehicle-mounted electromagnetic weaponry that will be capable of taking out a column of enemy vehicles simply by neutralizing their systems. Or possibly a handheld device used by infantry (like Batman’s) to defend themselves against tanks and helicopters!
And of course, a militarized version of the technology is a no-brainer, given the military’s long-standing love affair with EM technology. Imagine, if you will, vehicle-mounted electromagnetic weaponry that will be capable of taking out a column of enemy vehicles simply by neutralizing their systems. Or possibly a handheld device used by infantry (like Batman’s) to defend themselves against tanks and helicopters!
It’s important to dream big! And in the meantime, be sure to enjoy this BBC video short that demonstrates the technology in action:
Sources: fastcompany.com, e2v.com
Judgement Day Update: The Robotic Security Gaurd
 It’s quite the interesting premise isn’t it? And one that might make an interesting movie! It’s known as the Knightscope, an “autonomous data machine” currently in development by Silicon Valley startup Knightscope Inc. Ultimately, the purpose of this new breed of robot will be to conduct the important and often monotonous task of keeping watch over property more cost effectively and comprehensively than a human security guard.
It’s quite the interesting premise isn’t it? And one that might make an interesting movie! It’s known as the Knightscope, an “autonomous data machine” currently in development by Silicon Valley startup Knightscope Inc. Ultimately, the purpose of this new breed of robot will be to conduct the important and often monotonous task of keeping watch over property more cost effectively and comprehensively than a human security guard.
Earlier this month, Knightscope revealed that they had secured beta customers for the first two models – the K5 and K10. The robots, which share a passing resemblance to R2-D2, collect real-time data via a network of sensors. These would range from 360-degree HD video camera, microphones, thermal imaging sensors, infrared sensors, radar, lidar, ultrasonic speed and distance sensors, air quality sensors, and optical character recognition technology for scanning things like license plates.
 Depending on the sensor loadout, the units can be used to monitor differences in temperature, calculate the traveling speed and distance of surrounding objects/people, observe night time activity using infrared technology, and provide precision 3D mapping of an area. There are also plans to include facial recognition technology to help recognize an offender or wanted persons once the technology has been perfected.
Depending on the sensor loadout, the units can be used to monitor differences in temperature, calculate the traveling speed and distance of surrounding objects/people, observe night time activity using infrared technology, and provide precision 3D mapping of an area. There are also plans to include facial recognition technology to help recognize an offender or wanted persons once the technology has been perfected.
This data would then be fed into a centralized data center that law enforcement agencies would be able to access data in real time, giving them a unique vantage point to assess the situation before arrival. As well as providing real time alerts, Knightscope says companies will be able to analyze historical data collected over time to help predict crime and allow companies to make better business decisions.
 According to William Santana Li, Chairman and CEO of Knightscope, the inspiration behind these security robots came from the terrible tragedy that occurred over a year ago in a Connecticut school:
According to William Santana Li, Chairman and CEO of Knightscope, the inspiration behind these security robots came from the terrible tragedy that occurred over a year ago in a Connecticut school:
We founded Knightscope in response to the President and Sandy Hook’s calls to action and with the ultimate goal of providing an avenue for all Americans to join the fight against crime.
The company also says that the K10 model is intended for vast open areas and on private roads, while the K5 robot is better suited to more space-constrained environments. In essence, the K10 would be well suited to things like detailed traffic analysis while the K5 would be capable of handling indoor tasks, everything ranging from security to factory inspections.
 Personally, I think a fleet of robotic surveillance and security robots is an cost-effective and sensible alternative to bulletproofing classrooms or arming teachers. So far, no options have been made for arming the robots, but that’s probably for the be best. No sense in arming the machines before they are intelligent enough to turn them on their masters with hostile intent!
Personally, I think a fleet of robotic surveillance and security robots is an cost-effective and sensible alternative to bulletproofing classrooms or arming teachers. So far, no options have been made for arming the robots, but that’s probably for the be best. No sense in arming the machines before they are intelligent enough to turn them on their masters with hostile intent!
The K5 Beta prototype was featured at the Plug and Play Winter Expo in Sunnyvale, California and beta testing is due to commence at the end of this year. And be sure to enjoy the following video, courtesy of the Knightscope company
Source: gizmag.com
News From Space: Plants on the Moon by 2015!
 The moon remains the focal point of much of our space-related goals for the near future. In addition to China recently landing its Jade Rabbit probe, the more ambitious plans of NASA and the ESA involve building a settlement there in the near future. But of course, these and other plans to turn the moon into a new frontier from humanity are marred by the fact the environment is not habitable.
The moon remains the focal point of much of our space-related goals for the near future. In addition to China recently landing its Jade Rabbit probe, the more ambitious plans of NASA and the ESA involve building a settlement there in the near future. But of course, these and other plans to turn the moon into a new frontier from humanity are marred by the fact the environment is not habitable.
Luckily, NASA plans to change that, starting with growing plants on the lunar surface. And while this might seem like a long way away from building sealed domes and mounting full-scale terraforming, it is a big step in that direction. Aside from the obvious life support that vegetation would provide – air, food, and water – it would also provide another integral aspect to a habitable lunar environment.
 Plants react to aspects of a harsh environment similarly to humans, as their genetic material can be damaged by radiation. A relatively safe way to test long-term lunar exposure is to send plants there and monitor their health. Rather than making the trip and dropping the plants off itself, NASA plans to use commercial spaceflight as the vehicle by which the plants will be sent up to the moon.
Plants react to aspects of a harsh environment similarly to humans, as their genetic material can be damaged by radiation. A relatively safe way to test long-term lunar exposure is to send plants there and monitor their health. Rather than making the trip and dropping the plants off itself, NASA plans to use commercial spaceflight as the vehicle by which the plants will be sent up to the moon.
And that’s where Google comes in, NASA’s proposed partner for this venture. Using the Moon Express, a small, lightweight craft (about 1 kilogram or 2 pounds) that will act as a self-sustaining habitat for the vegetation, NASA will deliver these plants to the moon by 2015. This lunar lander is part of the Google Lunar X Prize, a competition to create a robotic spacecraft that can fly to and land on the moon.
 Once the lander arrives on the moon, water will be added to the basil, turnip, and Arabidopsis (a small flowering plant) seeds kept in the habitat, then monitored for five to ten days and compared to control groups germinating back on Earth. NASA will also monitor the actual habitat itself, looking toward its scalability since the small habitat isn’t large enough to support human life.
Once the lander arrives on the moon, water will be added to the basil, turnip, and Arabidopsis (a small flowering plant) seeds kept in the habitat, then monitored for five to ten days and compared to control groups germinating back on Earth. NASA will also monitor the actual habitat itself, looking toward its scalability since the small habitat isn’t large enough to support human life.
Currently, the chamber can support 10 basil seeds, 10 turnip seeds, and around 100 Arabidopsis seeds. It also holds the bit of water that initiates the germination process, and uses the natural sunlight that reaches the moon to support the plant life. In order to study the quality of the plant growth and movement, the habitat will take images and beam them back home.
 If NASA doesn’t run into any unexpected bumps, its long-term plans include attempting to grow a more diverse array of plants, longer growth periods, and reproduction experiments. The longer the experiments, the more we’ll learn about the long-term effects of a lunar environment on Earth plants, which will tell us much of what we need to know if we ever plan on building true settlements there in the future.
If NASA doesn’t run into any unexpected bumps, its long-term plans include attempting to grow a more diverse array of plants, longer growth periods, and reproduction experiments. The longer the experiments, the more we’ll learn about the long-term effects of a lunar environment on Earth plants, which will tell us much of what we need to know if we ever plan on building true settlements there in the future.
Sources: extremetech.com, nasa.gov
The Future is Here: Weight-Controlling Implants
 Obesity is one of the greatest epidemics effecting children in the developed world, resulting in billions spent annually on fad diets, miracle foods, and exercise programs. But researchers ETH-Zurich have come up with a potential high-tech solution to the problem. It consists of an implant that monitors fat in the blood and, in response to elevated levels, it produces a substance that tells the body that it’s not hungry.
Obesity is one of the greatest epidemics effecting children in the developed world, resulting in billions spent annually on fad diets, miracle foods, and exercise programs. But researchers ETH-Zurich have come up with a potential high-tech solution to the problem. It consists of an implant that monitors fat in the blood and, in response to elevated levels, it produces a substance that tells the body that it’s not hungry.
The method relies on a “genetic circuit”, a component that perform logical operations in living cells. Originally developed by Boston University biomedical engineers Ahmad S. Khalil and James J. Collins, the regulatory circuit is put together using mostly biological components. These consisted of several genes that generate particular proteins and reactions. This compound was inserted into tiny capsules.
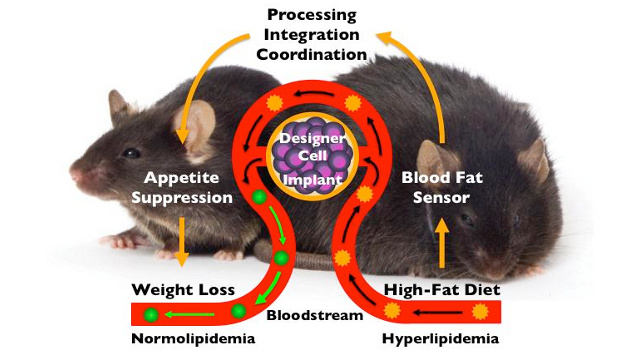 The circuit essentially performs two functions: monitoring the circulating fat levels in the blood, and then, in the event of detecting excess levels, produces a messenger substance that conveys a cognitive response that tells the user they are full and sated. For the sake of the experiment, the mice were continually given high-fat foods. As ETH-Zurich professor Martin Fussenegger explained in a statement:
The circuit essentially performs two functions: monitoring the circulating fat levels in the blood, and then, in the event of detecting excess levels, produces a messenger substance that conveys a cognitive response that tells the user they are full and sated. For the sake of the experiment, the mice were continually given high-fat foods. As ETH-Zurich professor Martin Fussenegger explained in a statement:
Instead of placing the mice on a diet to achieve weight loss, we kept giving the animals as much high-calorie food as they could eat.
The implants responded as expected, causing the obese mice to stop their excessive eating, and their bodyweight dropped noticeably as a result. Once their blood-fat levels returned to normal, the implant stopped producing the fullness signal. As for the control group, mice that received normal animal feed with a 5% fat content did not lose any weight or reduce their intake of food.
 Interestingly, the sensor can also detect different types of fat, including saturated and unsaturated animal and vegetable fats — even when they’re all ingested at the same time. This allows people to continue to take in the kinds of fats their bodies depend upon – such as Omega fatty acids and unsaturated fats – while limiting their intake of saturated fat, something we as a society get far too much of.
Interestingly, the sensor can also detect different types of fat, including saturated and unsaturated animal and vegetable fats — even when they’re all ingested at the same time. This allows people to continue to take in the kinds of fats their bodies depend upon – such as Omega fatty acids and unsaturated fats – while limiting their intake of saturated fat, something we as a society get far too much of.
But of course, there are challenges in adapting this technology for human used. The researchers caution that it will take several more years to develop an implant that do the same job for the human body. But given the exponential rate of development with medical and health-monitoring implants, we can expect to be seeing a full range of weight-control or even diet-specific and allergen-detecting implants before long.
 In addition to weight loss, this and other breakthroughs like it could facilitate the development of artificial cells designed to solve problems in medicine, energy, and the environment. It’s also a major step towards an age where people are able to manipulate their own biochemistry, and the building blocks of nature, at a microscopic level. Another step forward towards the nanotechnological revolution!
In addition to weight loss, this and other breakthroughs like it could facilitate the development of artificial cells designed to solve problems in medicine, energy, and the environment. It’s also a major step towards an age where people are able to manipulate their own biochemistry, and the building blocks of nature, at a microscopic level. Another step forward towards the nanotechnological revolution!
The Future of Fusion: 1-MW Cold Fusion Plant Now Available!
 It’s actually here: the world’s first fusion power plant that is capable of generated a single megawatt of power and is available for pre-order. It’s known as the E-Cat 1MW Plant, which comes in a standard shipping container and uses low-energy nuclear reactions (LENR) – a process, often known as cold fusion, that fuses nickel and hydrogen into copper – to produce energy 100,000 times more efficiently than combustion.
It’s actually here: the world’s first fusion power plant that is capable of generated a single megawatt of power and is available for pre-order. It’s known as the E-Cat 1MW Plant, which comes in a standard shipping container and uses low-energy nuclear reactions (LENR) – a process, often known as cold fusion, that fuses nickel and hydrogen into copper – to produce energy 100,000 times more efficiently than combustion.
E-Cat, or Energy Catalyzer, is a technology (and company of the same name) developed by Andrea Rossi – an Italian scientist who claims he’s finally harnessed cold fusion. For just $1.5 million, people can pre-order an E-Cat and expect delivery by early 2014. With this news, many are wondering if the age of cold fusion, where clean, abundant energy is readily available, is finally upon us.
 Cold fusion, as the name implies, is like normal fusion, but instead of producing fast neutrons and ionizing radiation that decimates everything in its path, cold fusion’s Low-Energy Nuclear Reactions (LENR) produce very slow, safe neutrons. Where normal fusion requires massive, expensive containment systems, it sounds like E-Cat’s cold fusion can be safely contained inside a simple, pressurized vessel.
Cold fusion, as the name implies, is like normal fusion, but instead of producing fast neutrons and ionizing radiation that decimates everything in its path, cold fusion’s Low-Energy Nuclear Reactions (LENR) produce very slow, safe neutrons. Where normal fusion requires massive, expensive containment systems, it sounds like E-Cat’s cold fusion can be safely contained inside a simple, pressurized vessel.
And while normal fusion power is generated by fusing hydrogen atoms, cold fusion fuses nickel and hydrogen into copper, by way of some kind of special catalyst. Despite the rudimentary setup, though, cold fusion still has the massive power and energy density intrinsic to atomic fusion. In short, it produces far more energy than conventional chemical reactions – such as burning fossil fuels. The only challenge is, the massive amounts of power that are usually required to initiate the reaction.
 According to E-Cat, each of its cold fusion reactors measures 20x20x1 centimeters (7.8×7.8×0.39 inches) and you stack these individual reactors together in parallel to create a thermal plant. The E-Cat 1MW Plant consists of 106 of these units rammed into a standard shipping container. Based on the specs provided by Rossi, the fuel costs works out to be $1 per megawatt-hour, which is utterly insane. Coal power is around $100 per megawatt-hour.
According to E-Cat, each of its cold fusion reactors measures 20x20x1 centimeters (7.8×7.8×0.39 inches) and you stack these individual reactors together in parallel to create a thermal plant. The E-Cat 1MW Plant consists of 106 of these units rammed into a standard shipping container. Based on the specs provided by Rossi, the fuel costs works out to be $1 per megawatt-hour, which is utterly insane. Coal power is around $100 per megawatt-hour.
But before anyone gets too excited about the commercialization of cold fusion, it should be noted that Rossi is still being incredibly opaque about how his cold fusion tech actually works. The data sheet for the 1MW Plant shares one interesting tidbit: Despite producing 1MW of power, the plant requires a constant 200 kilowatts of input power — presumably to sustain the reaction.
 The spec sheet also says that the fuel (specially treated nickel and hydrogen gas) needs to be recharged every two years. One of the science community’ biggest sticking points about Rossi’s cold fusion devices is that he hasn’t proven that his LENR is self-sustaining. Despite a huge amount of output energy, the device still needs to be connected to the mains.
The spec sheet also says that the fuel (specially treated nickel and hydrogen gas) needs to be recharged every two years. One of the science community’ biggest sticking points about Rossi’s cold fusion devices is that he hasn’t proven that his LENR is self-sustaining. Despite a huge amount of output energy, the device still needs to be connected to the mains.
What’s more, due to a lack of published papers, and thus peer review, and a dearth of protective patents, the scientific community in general remains very wary of Rossi’s claims. And of course, we should all remember that this is not the first time that researchers have proclaimed victory in the race to make cold fusion happen. Whenever the words “cold fusion” are raised in conjunction, the case of the Fleischmann–Pons experiment immediately springs to mind.
 For those who remember, this case involved an experiment made in 1989 where two researchers claimed to have achieved cold fusion using palladium rods and heavy water. Initially, the scientific community treated the news with exciteent and interest, but after numerous labs were unable to reproduce their experiment, and a number of false positives were reported, their claims were officially debunked and they relocated their lab to avoid any further controversy.
For those who remember, this case involved an experiment made in 1989 where two researchers claimed to have achieved cold fusion using palladium rods and heavy water. Initially, the scientific community treated the news with exciteent and interest, but after numerous labs were unable to reproduce their experiment, and a number of false positives were reported, their claims were officially debunked and they relocated their lab to avoid any further controversy.
At the same time, however, one must remember that some significant changes have happened in the past three decades. For one, NASA’s LENR facility has been working on producing cold fusion reactions for some time using an oscillating nickel lattice and hydrogen atoms. Then there was the recent milestone produced by the National Ignition Facility in California, which produced the first fusion reaction using lasers that produced more energy than it required.
Who’s to say if this is the real deal? All that is known is that between this most recent claim, and ongoing experiments conducted by NASA and other research organizations to make LENR cold fusion happen, a revolution in clean energy is set to happen, and will most likely happen within our lifetimes.
Addendum: Just been informed by WordPress that this is my 1400th post! Woot-woot!
Sources: extremetech.com, ecat.com
The Future is Here: Crowdfunded Flying Cars!
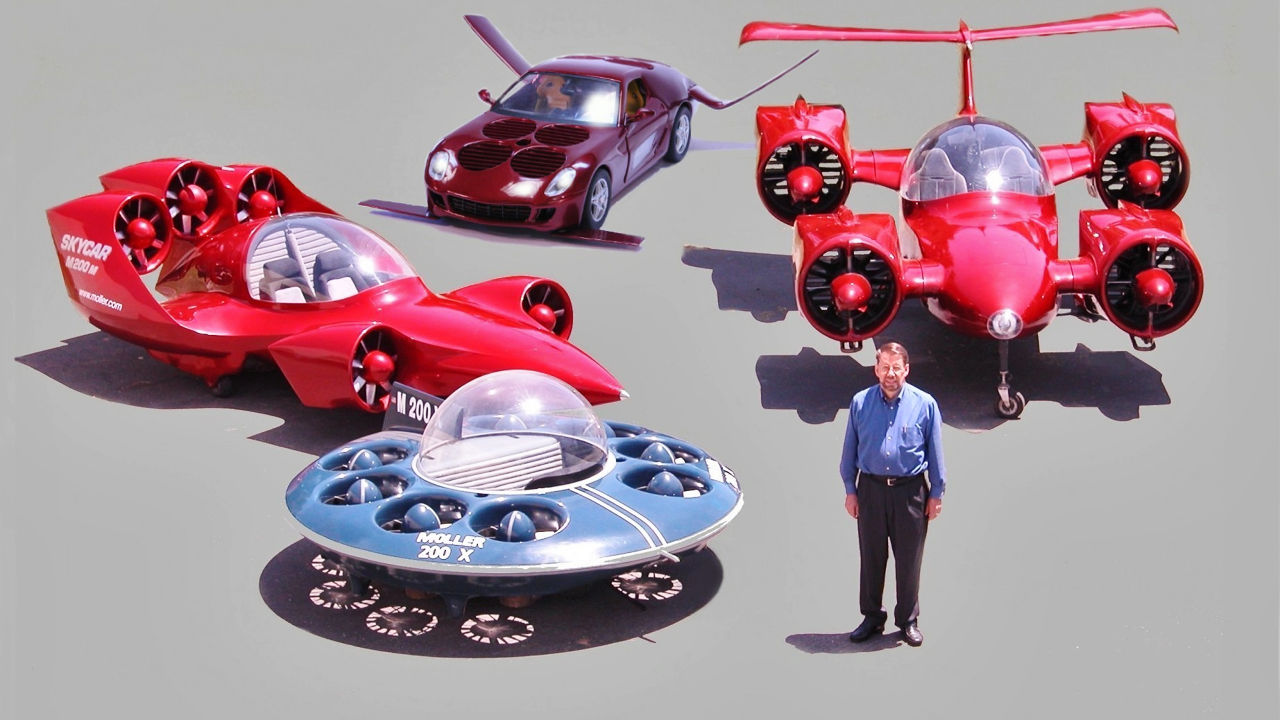 Yes, after years of expectations and failed promises, flying cars have finally arrived! Okay, arrived may be a bit of a strong word. But the prototype has been built, and all that’s needed now is some final safety testing to get FAA approval. Then, aerospace inventor Paul Moller will have realized his thirty-year dream of bringing a viable flying car to the market. And to raise money for these tests, he’s mounted a crowdfunding campaign.
Yes, after years of expectations and failed promises, flying cars have finally arrived! Okay, arrived may be a bit of a strong word. But the prototype has been built, and all that’s needed now is some final safety testing to get FAA approval. Then, aerospace inventor Paul Moller will have realized his thirty-year dream of bringing a viable flying car to the market. And to raise money for these tests, he’s mounted a crowdfunding campaign.
Known as the M400X (aka. Skycar), this car is the a vertical take-off and landing vehicle that is also capable of horizontal flight. Powered by eight ethanol-fueled engines, it is designed to cruise at a speed of 500 km/h (315 mph) at a of height of 7600 meters (25,000 feet), or 320 km/h (200 mph) at sea level. A four-seat model that is about the size of a large SUV, this car weighs only 545 kilograms (1,200 lbs), thanks to a carbon fiber and Kevlar composite shell.
 In total, it is expected to be able to fly for roughly 1200 (750 miles) without refueling, giving it a fuel economy of roughly 10 km/liter (25 mpg). In addition, a top land speed of 50 km/h (30 mph) makes short-distance street travel feasible. In these respects, it is far more sophisticated than other flying car designs – such as the Airbike and Terrafugia – in that it does not require an airport runway to take off and land, but can taxi when it needs to cover only a small stretch of ground.
In total, it is expected to be able to fly for roughly 1200 (750 miles) without refueling, giving it a fuel economy of roughly 10 km/liter (25 mpg). In addition, a top land speed of 50 km/h (30 mph) makes short-distance street travel feasible. In these respects, it is far more sophisticated than other flying car designs – such as the Airbike and Terrafugia – in that it does not require an airport runway to take off and land, but can taxi when it needs to cover only a small stretch of ground.
The campaign began last month over at Indiegogo and will run to January 4th 2014, by which time, Moller and his company (Moller Int) hope to raise $958,000 of the $1.89 million needed to install the motors and FAA-required safety elements in the vehicle. Naturally, every donation comes with a prize, depending on the amount of money donated. And the grand prize, for a cool $15,000 dollars, is a chance to ride shotgun on the maiden voyage of the Skycar.
 Of that total, $932,000 has already been pledged by Nitroturbodyne – an FAA-designated engineering firm handling flight testing – and a former Moller subsidiary named Freedom Motors, which built the rotary engines, and the CliC protective goggles. By going the crowdfunding route, as opposed to corporate sponsorships, stock shares, or venture capital, Moller Int. hopes to raise the money faster while retaining more company control.
Of that total, $932,000 has already been pledged by Nitroturbodyne – an FAA-designated engineering firm handling flight testing – and a former Moller subsidiary named Freedom Motors, which built the rotary engines, and the CliC protective goggles. By going the crowdfunding route, as opposed to corporate sponsorships, stock shares, or venture capital, Moller Int. hopes to raise the money faster while retaining more company control.
Moller, an inventor and TED talker, was also a professor of aeronautics at the University of California before starting the company in 1983. According to him, the decision to crowdfunds was a way of ensuring that public participation in the project, without the need for centralized measures like stocks:
We didn’t want to dilute the stock value by issuing more shares. Crowdfunding is a way for the average person to make a direct contribution towards a specific project without having to buy stock. This way, we can give really nice gifts and make people part of a team that can help make this happen.
All proceeds from the Indiegogo campaign will be used to prepare the Skycar for a June public unveiling where it will conduct an official test flight at an altitude of 600 meters (2,000 feet). Another six months of testing to meet FAA requirements will follow, before donors get their guest flights. After that, Moller will donate the M400 to the Smithsonian National Air and Space Museum in Washington, D.C.
 From there, he’ll focus on a smaller, two-person Skycar M200 (seen above), which will be made available to the public in about five years time – assuming all goes according to plan. If you have any interest in donating to this cause, which will see a millennial dream become a reality at long last, just go to the Indiegogo page and pledge what you like. Then start saving your pennies for the when the 200 model hits the market. It’s likely to be pricey!
From there, he’ll focus on a smaller, two-person Skycar M200 (seen above), which will be made available to the public in about five years time – assuming all goes according to plan. If you have any interest in donating to this cause, which will see a millennial dream become a reality at long last, just go to the Indiegogo page and pledge what you like. Then start saving your pennies for the when the 200 model hits the market. It’s likely to be pricey!
And in the meantime, be sure to check out this promotional video from Moller International:
Sources: fastcocreate.com, indiegogo.com
The Future is Here: The DARPA/BD Wildcat!
 The robotics company of Boston Dynamics has been doing some pretty impressive things with robots lately. Just last year, they unveiled the Cheetah, the robotics company set a new land speed record with their four-footed robot named Cheetah. As part of DARPA’s Maximum Mobility and Manipulation program, the robotic feline demonstrated the ability to run at a speed of 45.06 km/h (28 mph).
The robotics company of Boston Dynamics has been doing some pretty impressive things with robots lately. Just last year, they unveiled the Cheetah, the robotics company set a new land speed record with their four-footed robot named Cheetah. As part of DARPA’s Maximum Mobility and Manipulation program, the robotic feline demonstrated the ability to run at a speed of 45.06 km/h (28 mph).
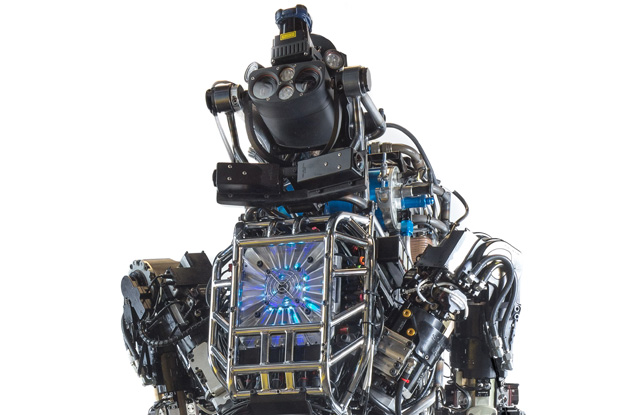
And in July of this year, they impressed and frightened the world again with the unveiling of their ATLAS robot – a anthropomorphic machine. This robot took part in the DARPA Robotics Challenge program. capable of walking across multiple terrains, and demonstrated its ability to walk across multiple types of terrain, use tools, and survey its environment with a series of head-mounted sensors.
 And now, they’ve unveiled an entirely new breed of robot, one that is capable of running fast on any kind of terrain. It’s known as the WildCat, a four-legged machine that builds on the world of the Legged Squad Support System (LS3) that seeks to create a robot that can support military units in the field, carrying their heavy equipment and supplies over rugged terrain and be operated by remote.
And now, they’ve unveiled an entirely new breed of robot, one that is capable of running fast on any kind of terrain. It’s known as the WildCat, a four-legged machine that builds on the world of the Legged Squad Support System (LS3) that seeks to create a robot that can support military units in the field, carrying their heavy equipment and supplies over rugged terrain and be operated by remote.
So far, not much is known about the robot’s full capabilities and or when it is expected to be delivered. However, in a video that was released in early October, Boston Dynamics showed the most recent field test of the robot to give people a taste of what it looks like in action. In the video, the robot demonstrated a top speed of about 25 km/h (16 mph) on flat terrain using both bounding and galloping gaits.
 Following in the footsteps of its four-legged and two-legged progeny, the WildCat represents a coming era of biomimetic machinery that seeks to accomplish impressive physical feats by imitating biology. Whereas the Atlas is designed to be capable of doing anything the human form can – traversing difficult terrain, surveying and inspecting, and using complex tools – the Cheetah, LS3, and WildCat draw their inspiration from nature’s best hunters and speed runners.
Following in the footsteps of its four-legged and two-legged progeny, the WildCat represents a coming era of biomimetic machinery that seeks to accomplish impressive physical feats by imitating biology. Whereas the Atlas is designed to be capable of doing anything the human form can – traversing difficult terrain, surveying and inspecting, and using complex tools – the Cheetah, LS3, and WildCat draw their inspiration from nature’s best hunters and speed runners.
Just think of it: a race of machines that can climb rocky outcroppings with the sure-footedness of a mountain goat, run as fast as a cheetah, stalk like a lion, bound like an antelope, and swing like a monkey. When it comes right down to it, the human form is inferior in most, if not all, of these respects to our mammalian brethren. Far better that we imitate them instead of ourselves when seeking to create the perfect helpers.
 In the end, it demonstrates that anthropomorphism isn’t the only source of drive when it comes to developing scary and potential doomsday-bating robots! And in the meantime, be sure to enjoy these videos of these various impressive, scary, and very cool robots in action:
In the end, it demonstrates that anthropomorphism isn’t the only source of drive when it comes to developing scary and potential doomsday-bating robots! And in the meantime, be sure to enjoy these videos of these various impressive, scary, and very cool robots in action:
WildCat:
Cheetah:
Atlas:
Source: universetoday.com, bostondynamics.com
News From Space: China’s Jade Rabbit Moon Rover
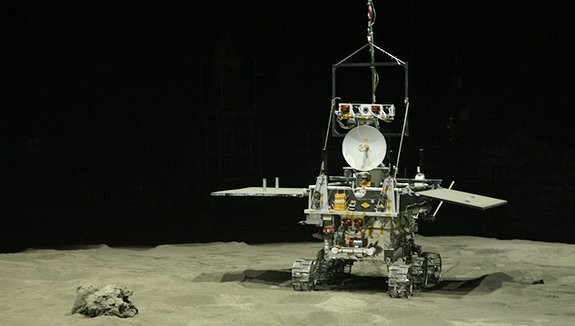
 Earlier this week, China took another step towards becoming a major power in space with the launch of the Chang’e-3 lunar probe. On board this vehicle is the Yu Tu (Jade Rabbit) lunar rover, a vehicle that is designed to deploy from the vehicle once it reaches lunar orbit and explore the surface independently. If all continues to go to plan, the Chang’e-3 will reach the Moon by December 14th, and its arrival will certainly be historic.
Earlier this week, China took another step towards becoming a major power in space with the launch of the Chang’e-3 lunar probe. On board this vehicle is the Yu Tu (Jade Rabbit) lunar rover, a vehicle that is designed to deploy from the vehicle once it reaches lunar orbit and explore the surface independently. If all continues to go to plan, the Chang’e-3 will reach the Moon by December 14th, and its arrival will certainly be historic.
For starters, the probe’s landing in Sinus Iridum, a basaltic lava plane in the Moon’s northern hemisphere, will be the first spacecraft to make a soft landing on the Moon in 37 years. In addition, it will the be the first time China has landed a spacecraft and a rover on the Moon. This is the latest in the Chang’e program, a series of robotic and human missions that ultimately seeks to put Chinese cosmonauts on the Moon.
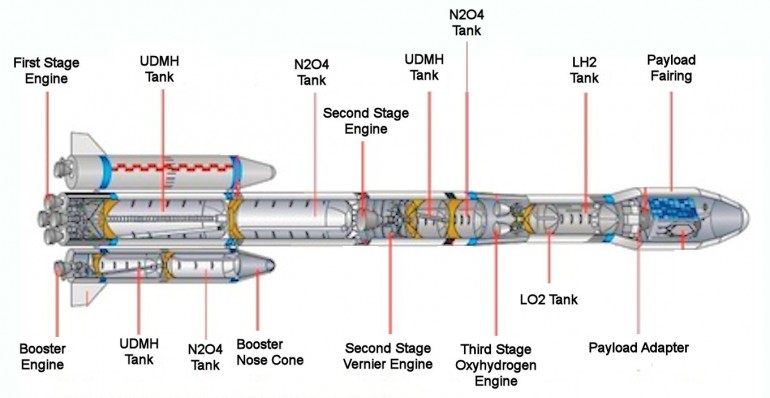 The Chang’e-3 mission incorporates two major components – the Lander and the Jade Rabbit rover, which is named after the companion of the Moon goddess Chang’e in Chinese mythology. The three-stage Chang Zheng 3B (Long March 3B) launch vehicle that is being used to send the Chang’e-3 probe to the Moon is roughly a functional equivalent of SpaceX’s Falcon 9 rocket, the heaviest rocket in their fleet.
The Chang’e-3 mission incorporates two major components – the Lander and the Jade Rabbit rover, which is named after the companion of the Moon goddess Chang’e in Chinese mythology. The three-stage Chang Zheng 3B (Long March 3B) launch vehicle that is being used to send the Chang’e-3 probe to the Moon is roughly a functional equivalent of SpaceX’s Falcon 9 rocket, the heaviest rocket in their fleet.
After launching on Monday from the Xichang Satellite Launch Centre, the rocket was placed into an Earth-Moon transfer orbit and conducted its first separation. Shortly thereafter, its second stage engines were engaged to effect course corrections and bring the lander and rover into lunar orbit. Then came two crucial burns from the third stage engines, which put the Chang’e-3 probe into a parking and then highly elliptical translunar orbit.
 Throughout all this, the probe slept, and will continue to do so until it burns its own engines to enter lunar orbit tomorrow.Then will come the tricky bit, landing safely without any input from controllers on Earth. This requires a combination of inertial guidance, extremely precise range and velocity measurements, image recognition, and a pretty fast computer – not to mention a certain amount of luck.
Throughout all this, the probe slept, and will continue to do so until it burns its own engines to enter lunar orbit tomorrow.Then will come the tricky bit, landing safely without any input from controllers on Earth. This requires a combination of inertial guidance, extremely precise range and velocity measurements, image recognition, and a pretty fast computer – not to mention a certain amount of luck.
Once landed, the six-wheeled rover will begin exploring the surface and collecting soil samples for analysis. As with other rovers, energy will be provided by a series of solar panels and information obtained during its mission will be sent back to Earth for further analysis. In addition, real-time video and pictures will be captured by the rover’s arsenal of cameras, all of which will be sent back to Earth and shared via Chinese media outlets.
 In addition to being a first for China’s space program, the Jade Rabbit also has the added distinction of being outfitted with what is arguably the most sophisticated scientific equipment of any previous rover. Most notable is a powerful ground-penetrating radar capable of penetrating up to 30 meters (100 ft) of lunar soil or about 100 m (330 ft) of lunar crustal material, and analyzing the underlying structure.
In addition to being a first for China’s space program, the Jade Rabbit also has the added distinction of being outfitted with what is arguably the most sophisticated scientific equipment of any previous rover. Most notable is a powerful ground-penetrating radar capable of penetrating up to 30 meters (100 ft) of lunar soil or about 100 m (330 ft) of lunar crustal material, and analyzing the underlying structure.
The rover is also equipped with an Alpha Particle X-ray Spectrometer (APXS) that uses particle-induced X-ray emission and X-ray fluorescence to determine the abundance of elements within rock and soil samples. The instrument can also find hidden materials, such as water of crystallization, which is otherwise difficult to detect remotely. Finding water on the Moon is an ongoing objective for space agencies, and crucial to plans for future settlement.
 Then there is the Lunar Ultraviolet Telescope (LUT), which is designed to act as the first long-term astronomical observatory to ever be placed on the Moon’s surface. The vacuum environment and slow rotation of the lunar environment make an ideal location for near-UV observations that cannot be carried out from beneath the Earth’s obscuring atmosphere.
Then there is the Lunar Ultraviolet Telescope (LUT), which is designed to act as the first long-term astronomical observatory to ever be placed on the Moon’s surface. The vacuum environment and slow rotation of the lunar environment make an ideal location for near-UV observations that cannot be carried out from beneath the Earth’s obscuring atmosphere.
Another optical instrument is the Extreme Ultraviolet Camera intended to monitor the Earth’s plasmasphere, which is a magnetically active region within the magnetosphere but above the ionosphere. It works by viewing light with a wavelength of 30.5 nm which is scattered from helium ions in the plasmasphere. The lander is also hosting several other cameras and a lunar soil probe.
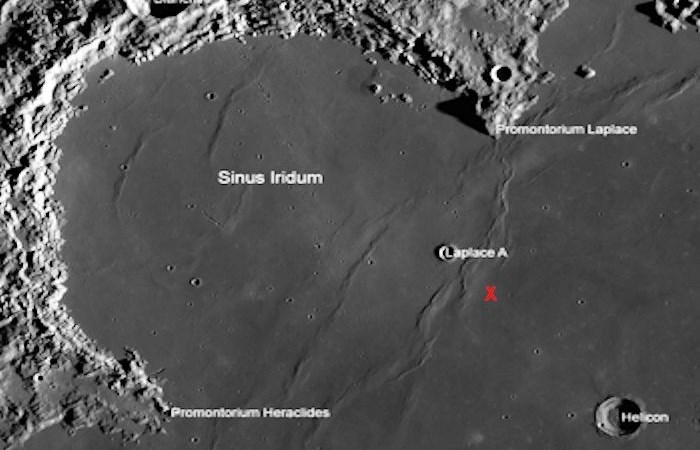 As already stated, the landing site for Chang’e-3 is in the general area of Sinus Iridum, a northwestern extension to the Mare Imbrium basaltic plane which is surrounded from the northeast to the southwest by the Montes Jura mountain range. A precise location has not yet been announced by Chinese authorities, but it has been widely speculated that it will take place within the vicinity of crater Laplace A – a crater that is about 9 km in diameter.
As already stated, the landing site for Chang’e-3 is in the general area of Sinus Iridum, a northwestern extension to the Mare Imbrium basaltic plane which is surrounded from the northeast to the southwest by the Montes Jura mountain range. A precise location has not yet been announced by Chinese authorities, but it has been widely speculated that it will take place within the vicinity of crater Laplace A – a crater that is about 9 km in diameter.
This is certainly an exciting time, as we are likely to learn plenty of new things about the Moon in the next few weeks! And in the meantime, be sure to check out this animation of the Change’e-3 entire mission- from launch to touchdown and deployment on the Moon, courtesy of RyukyuSARs:
Sources: gizmag.com, nasaspaceflight.com
The Future of Money
 The good people over at Envisioning Technology – the independent research organization based on Brazil – have produced yet another intriguing infographic. As some of you may recall, whenever ET has released a new inforgraphic, I’ve been right there to post about it. So far, they have produced graphics addressing the future of Technology, Education, Health, and Finance.
The good people over at Envisioning Technology – the independent research organization based on Brazil – have produced yet another intriguing infographic. As some of you may recall, whenever ET has released a new inforgraphic, I’ve been right there to post about it. So far, they have produced graphics addressing the future of Technology, Education, Health, and Finance.
There latest graphic is similarly significant and addresses the future of something that concerns and effects us all: money. Entitled “The Past, Present and Future of Money”, this graph looks at the trends affecting the buying, selling and investment patterns of people over time, contrasting three trends that are interwoven and have moved between centralized, decentralized, and distributed monetary systems.
 In this scenario, centralized tendencies refer to networks where the nodes are connected through dense centers (aka. urban environments), which rely on hierarchically structures institutions (i.e. banks) and require legal tender (physical money). This sort of system relies on an ordered distribution of power, one that generally favor the connected few, and which emerged with the advent of modern industrial civilization.
In this scenario, centralized tendencies refer to networks where the nodes are connected through dense centers (aka. urban environments), which rely on hierarchically structures institutions (i.e. banks) and require legal tender (physical money). This sort of system relies on an ordered distribution of power, one that generally favor the connected few, and which emerged with the advent of modern industrial civilization.
Decentralized tendencies are those which are based on networks where nodes connect in clusters, that have irregular distributions of power, and favor the selected individual. As the graph shows, these types of networks predate centralized networks, taking the form of bartering and commodities in earliest times, but which have emerged yet again in the modern era and are predicted to continue to grow.
 Examples of current and future trends here include crowdsourcing, crowdfunding, banking APIs (Application Programming Interfaces), microfinance, and collaborative consumptions – where access is developed so that consumers can lend, swap, barter, share, and gift products. Whereas this model predates centralized tendencies, it is once again emerging with decentralizing potential of digital technology and open-source databases.
Examples of current and future trends here include crowdsourcing, crowdfunding, banking APIs (Application Programming Interfaces), microfinance, and collaborative consumptions – where access is developed so that consumers can lend, swap, barter, share, and gift products. Whereas this model predates centralized tendencies, it is once again emerging with decentralizing potential of digital technology and open-source databases.
In the third and final method, one which is emerging, is the distributed network of money. These are networks where nodes connect independently, where power is distributed horizontally, and which favor the entire network. This trend began as a result of global real-time communications (i.e. the internet, satellite communications, etc.), and which are expected to expand.
 Combining the concepts of attention economies, digital currencies, peer-to-peer communications, and digital wallets, the essence of this final stage is a network economy that is controlled by individuals, not financial institutions or corporations. In addition, currencies are based shared belief in their value, transactions occur between individuals, and physical currencies are replaced by digital ones.
Combining the concepts of attention economies, digital currencies, peer-to-peer communications, and digital wallets, the essence of this final stage is a network economy that is controlled by individuals, not financial institutions or corporations. In addition, currencies are based shared belief in their value, transactions occur between individuals, and physical currencies are replaced by digital ones.
Other trends that are incorporated and cross-referenced into this infographic include global population versus the number of people per capita who have online access. As it stands, less than half the world’s 7 billion people currently have access to the internet, and are hence able to take part in the decentralizing and distributed trends affecting money. However, the infographic predicts that by 2063, nearly 90% of the world’s 10 billion people will be online.
 Like many predictions that I’ve come to know and respect, this latest infographic from ET gives us a glimpse of a future where a Distributed model of politics, economics and technological development – otherwise known as Democratic Anarchy – will be the norm. It’s an exciting possibility, and places history in a new and interesting light. In short, it makes one reconsider the possibility that true socialism might exist.
Like many predictions that I’ve come to know and respect, this latest infographic from ET gives us a glimpse of a future where a Distributed model of politics, economics and technological development – otherwise known as Democratic Anarchy – will be the norm. It’s an exciting possibility, and places history in a new and interesting light. In short, it makes one reconsider the possibility that true socialism might exist.
While this was crudely predicted by Karl Marx, the basic concept is quite intriguing when considered in the context of current trends. What’s more, subsequent thinkers – Max Weber, Proudhon, Gramsci and George Orwell – refined and expressed the principle more eloquently. Nowhere was this more apparent than in the Goldstein Manifesto in 1984, where Orwell addressed how the process of industrial civilization was making class distinction virtually unnecessary.
 Source: envisioning.io/money/
Source: envisioning.io/money/
