The robotics company of Boston Dynamics has been doing some pretty impressive things with robots lately. Just last year, they unveiled the Cheetah, the robotics company set a new land speed record with their four-footed robot named Cheetah. As part of DARPA’s Maximum Mobility and Manipulation program, the robotic feline demonstrated the ability to run at a speed of 45.06 km/h (28 mph).
And in July of this year, they impressed and frightened the world again with the unveiling of their ATLAS robot – a anthropomorphic machine. This robot took part in the DARPA Robotics Challenge program. capable of walking across multiple terrains, and demonstrated its ability to walk across multiple types of terrain, use tools, and survey its environment with a series of head-mounted sensors.
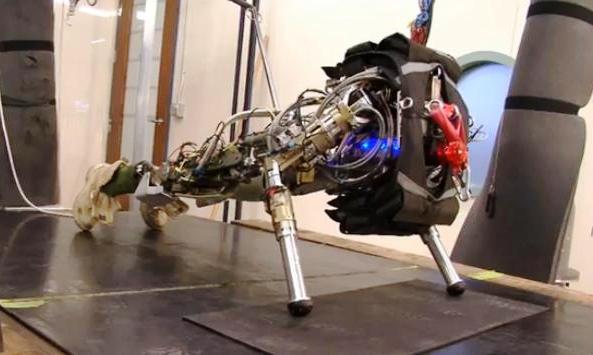
And now, they’ve unveiled an entirely new breed of robot, one that is capable of running fast on any kind of terrain. It’s known as the WildCat, a four-legged machine that builds on the world of the Legged Squad Support System (LS3) that seeks to create a robot that can support military units in the field, carrying their heavy equipment and supplies over rugged terrain and be operated by remote.
So far, not much is known about the robot’s full capabilities and or when it is expected to be delivered. However, in a video that was released in early October, Boston Dynamics showed the most recent field test of the robot to give people a taste of what it looks like in action. In the video, the robot demonstrated a top speed of about 25 km/h (16 mph) on flat terrain using both bounding and galloping gaits.
Following in the footsteps of its four-legged and two-legged progeny, the WildCat represents a coming era of biomimetic machinery that seeks to accomplish impressive physical feats by imitating biology. Whereas the Atlas is designed to be capable of doing anything the human form can – traversing difficult terrain, surveying and inspecting, and using complex tools – the Cheetah, LS3, and WildCat draw their inspiration from nature’s best hunters and speed runners.
Just think of it: a race of machines that can climb rocky outcroppings with the sure-footedness of a mountain goat, run as fast as a cheetah, stalk like a lion, bound like an antelope, and swing like a monkey. When it comes right down to it, the human form is inferior in most, if not all, of these respects to our mammalian brethren. Far better that we imitate them instead of ourselves when seeking to create the perfect helpers.
In the end, it demonstrates that anthropomorphism isn’t the only source of drive when it comes to developing scary and potential doomsday-bating robots! And in the meantime, be sure to enjoy these videos of these various impressive, scary, and very cool robots in action:
I love to study this thing we call “the future”, and began to do so as a hobby the day I made the decision to become a sci-fi writer. And if there’s anything I’ve learned, its that the future is an intangible thing, a slippery beast we try to catch by the tail at any given moment that is constantly receding before us. And when predict it, we are saying more about the time in which we are living than anything that has yet to occur.
As William Gibson famously said: “…science fiction was always about the period in which it was written.” At every juncture in our history, what we perceive as being the future changes based on what’s going on at the time. And always, people love to bring up what has been predicted in the past and either fault or reward the authors for either “getting it right” or missing the mark.
This would probably leave many people wondering what the point of it all is. Why not just wait and let the future tend to itself? Because it’s fun, that’s why! And as a science fiction writer, its an indispensable exercise. Hell, I’d argue its absolutely essential to society as a whole. As a friend of one once said, “science fiction is more of a vehicle than a genre.” The point is to make observations about society, life, history, and the rest.
And sometimes, just sometimes, predictive writers get it right. And lately, I’ve been inspired by sources like Future Timeline to take a look at the kinds of predictions I began making when I started writing and revising them. Not only have times changed and forced me to revise my own predictions, but my research into what makes humanity tick and what we’re up to has come a long way.
So here’s my own prediction tree, looking at the next few centuries and whats likely to happen…
21st Century:
2013-2050:
Ongoing recession in world economy, the United States ceases to be the greatest economic power
China, India, Russia and Brazil boast highest rates of growth despite continued rates of poverty
Oil prices spike due to disappearance of peak oil and costs of extracting tar sands
Solar power, wind, tidal power growing in use, slowly replacing fossil fuel and coal
First arcologies finished in China, Japan, Russia, India and the United States
Humanity begins colonizing the Moon and mounts manned mission to Mars
Settlements constructed using native soil and 3D printing/sintering technology
NASA tows asteroid to near Earth and begins studies, leading to plans for asteroid mining
Population grows to 9 billion, with over 6 living in major cities across the all five continents
Climate Change leading to extensive drought and famine, as well as coastal storms, flooding and fires
Cybernetics, nanotech and biotech leading to the elimination of disabilities
3D Construction and Computer-Assisted Design create inexpensive housing in developing world
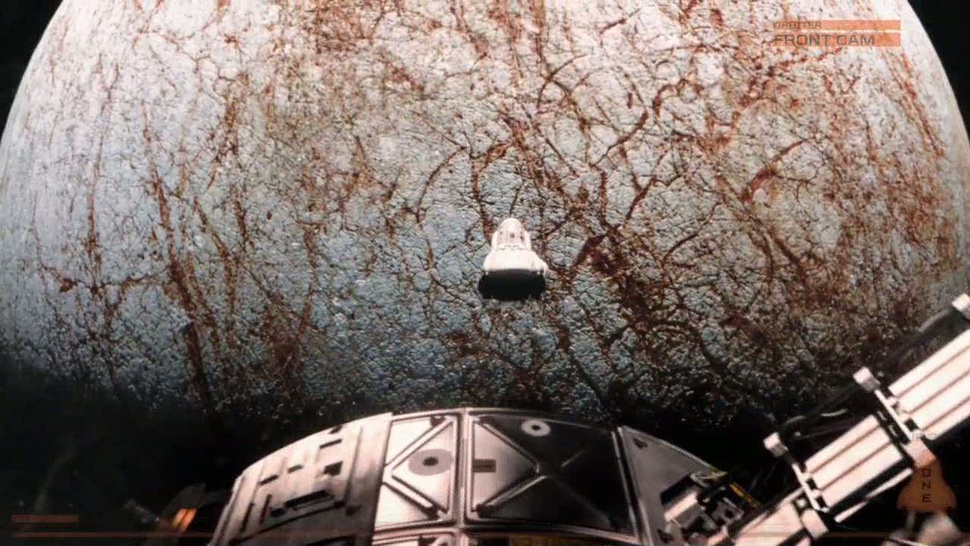
First exploratory mission to Europa mounted, discovers proof of basic life forms under the surface ice
Rome ordains first openly homosexual priests, an extremely controversial move that splits the church
First semi-sentient, Turing compatible AI’s are produced and put into service
Thin, transparent, flexible medical patches leading to age of “digital medicine”
Religious orders formed opposed to “augmentation”, “transhumanism” and androids
First true quantum computers roll off the assembly line
Creation of the worldwide quantum internet underway
Quantum cryptography leads to increased security, spamming and hacking begins to drop
Flexible, transparent smartphones, PDAs and tablets become the norm
Fully immersive VR environments now available for recreational, commercial and educational use
Carbon dioxide in the upper atmosphere passes 600 ppm, efforts to curb emissions are redoubled
ISS is retired, replaced by multiple space stations servicing space shuttles and commercial firms
World’s first orbital colony created with a population of 400 people
2050-2100:
Global economy enters “Second Renaissance” as AI, nanomachinery, quantum computing, and clean energy lead to explosion in construction and development
Commercial space travel become a major growth industry with regular trips to the Moon
Implant technology removes the need for digital devices, technology now embeddable
Medical implants leading to elimination of neurological disorders and injuries
Synthetic food becoming the rage, 3D printers offering balanced nutrition with sustainability
Canada, Russia, Argentina, and Brazil become leading exporters of foodstuffs, fresh water and natural gas
Colonies on the Moon and Mars expand, new settlement missions plotted to Ganymede, Europa, Oberon and Titan
Quantum internet expanding into space with quantum satellites, allowing off-world connectivity to worldwide web
Self-sufficient buildings with water recycling, carbon capture and clean energy becomes the norm in all major cities
Second and third generation “Martians” and “Loonies” are born, giving rise to colonial identity
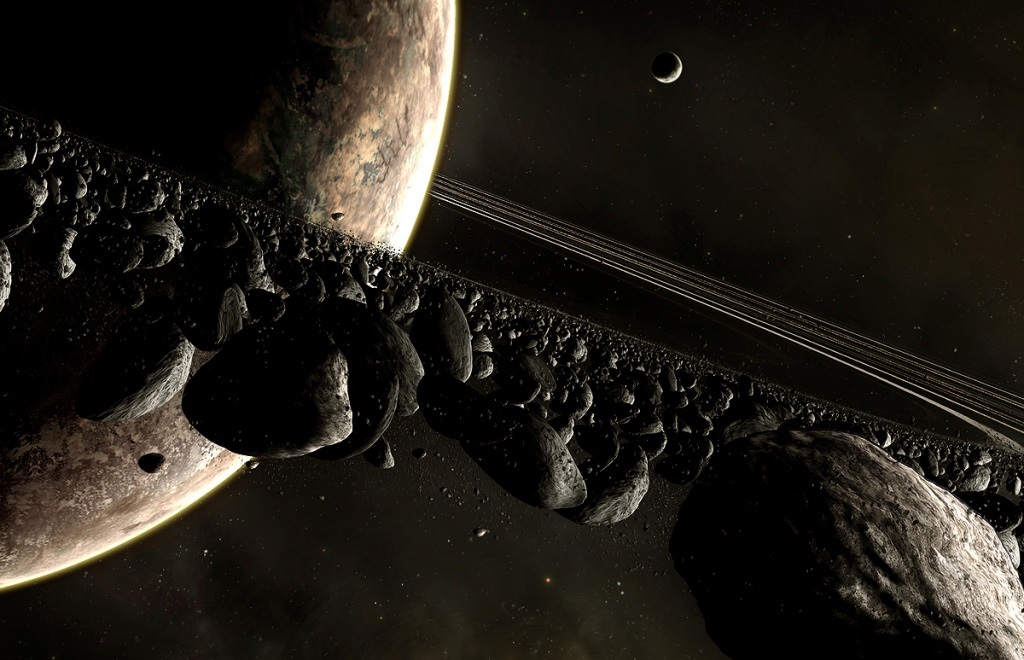
Asteroid Belt becomes greatest source of minerals, robotic foundries use sintering to create manufactured products
Europe experiences record number of cold winters due to disruption of the Gulf Stream
Missions mounted to extra-Solar systems using telexploration probes and space penetrators
Average life expectancy now exceeds 100, healthy children expected to live to 120 years of age
NASA, ESA, CNSA, RFSA, and ISRO begin mounting missions to exoplanets using robot ships and antimatter engines
Private missions to exoplanets with cryogenically frozen volunteers and crowdfunded spaceships
Severe refugee crises take place in South America, Southern Europe and South-East Asia
Militarized borders and sea lanes trigger multiple humanitarian crises
India and Pakistan go to war over Indus River as food shortages mount
China clamps down on separatists in western provinces of Xinjian and Tibet to protect source of the Yangtze and Yellow River
Biotechnology begins to grow, firms using bacteria to assemble structural materials
Fully sentient AIs created and integrated into all aspects of life
Traditionalist communities form, people seeking to disconnect from modern world and eschew enhancement
Digital constructs become available, making neurological downloads available
Nanotech research leading to machinery and materials assembled at the atomic level
Traditional classrooms giving way to “virtual classrooms”, on-demand education by AI instructors
Medical science, augmentation, pharmaceuticals and uploads lead to the first generation of human “Immortals”
Orbital colonies gives way to Orbital Nexus, with hundreds of habitats being established
Global population surpasses 12 billion despite widespread famine and displacement
Solar, wind, tidal, and fusion power replace oil and coal as the dominant power source worldwide
Census data shows half of world residents now have implants or augmentation of some kind
Research into the Alcubierre Drive begins to bear experimental results
22nd Century:
2100-2150:
Climate Change and global population begin to level off
First “Neural Collective” created, volunteers upload their thought patterns into matrix with others
Transhumanism becomes established religion, espousing the concept of transcendence
Widespread use of implants and augmentation leads to creation of new underclass called “organics”
Solar power industry in the Middle East and North Africa leading to growth in local economies
Biotech leads to growth of “glucose economy”, South American and Sub-Saharan economies leading in manufacture of biomaterials
Population in Solar Colonies and Orbital Nexus reaches 100,000 and continues to grow
Off-world industry continues to grow as Asteroid Belt and colonies provide the majority of Earth’s mineral needs
Famine now widespread on all five continents, internalized food production in urban spaces continues
UN gives way to UNE, United Nations of Earth, which has near-universal representation
First test of Alcubierre FTL Drive successful, missions to neighboring systems planned
Tensions begin to mount in Solar Colonies as pressure mounts to produce more agricultural goods
Extinction rate of wild animals begins to drop off, efforts at ecological restoration continue
First attempts to creating world religion are mounted, met with limited success
Governments in most developed countries transitioning to “democratic anarchy”
Political process and involvement becoming digitized as representation becomes obsolete
“Super-sentience” emerges as people merge their neural patterns with each other or AIs
Law reformed to recognize neural constructs and AIs as individuals, entitled to legal rights
Biotech research merges with AI and nanotech to create first organic buildings with integrated intelligence
2150-2200:
Majority of the world’s population live in arcologies and self-sufficient environments
Census reveals over three quarters of world lives with implants or augmentation of some kind
Population of Orbital Nexus, off-world settlements surpasses 1 million
First traditionalist mission goes into space, seeking world insulated from rapid change and development
Labor tensions and off-world riots lead to creation of Solar policing force with mandate to “keep the peace”
First mission to extra=Solar planets arrive, robots begin surveying surface of Gliese 581 g, Gliese 667C c, HD 85512 b, HD 40307 g, Gliese 163 c, Tau Ceti e, Tau Ceti f
Deep space missions planned and executed with Alcubierre Drive to distant worlds
1st Wave using relativistic engines and 2nd Wave using Alcubierre Drives meet up and begin colonizing exoplanets
Neighboring star systems within 25 light years begin to be explored
Terraforming begins on Mars, Venus and Europa using programmed strains of bacteria, nanobots, robots and satellites
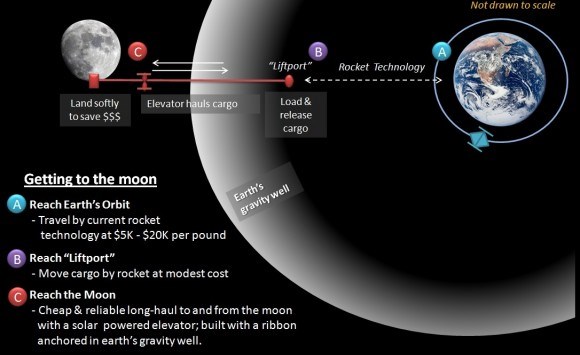
Space Elevator and Slingatron built on the Moon, used to transport people to space and send goods to the surface
Earth’s ecology begins to recover
Natural species are reintroduced through cloning and habitat recovery
Last reported famine on record, food production begins to move beyond urban farms
Colonies within 50 light years are established on Gliese 163 c, Gliese 581 g, Gliese 667C c, HD 85512 b, HD 40307 g, Tau Ceti e, Tau Ceti f
Off-world population reaches 5 million and continues to grow
Tensions between Earth and Solar Colonies continue, lead to demands for interplanetary governing body
Living, breathing cities become the norm on all settled worlds, entire communities build of integrated organic materials run by AIs and maintained by programmed DNA and machinery
23rd Century and Beyond:
Who the hell knows?
*Note: Predictions and dates are subject to revision based on ongoing developments and the author’s imagination. Not to be taken literally, and definitely open to input and suggestions.
It goes by the name of Robosimian, an ape-like robot that was built by NASA’s Jet Propulsion Laboratory. Designed and built by JPL and Stanford engineers, RoboSimian was a recent competitor in the DARPA Robotics Challenge, a competition where participants attempt to create strong, dextrous, and flexible robots that could aid in disasters as well as search and rescue missions.
Admittedly, the robot looks kind of creepy, due in no small part to the fact that it doesn’t have a head. But keep in mind, this machine is designed to save your life. As part of the DARPA challenge, they are intended to go places that would be too dangerous for humans. So I imagine whatever issues a person may have with its aesthetics would disappear when they spotted one crawling to their rescue.
To win the challenge, the semi-autonomous robots will have to complete difficult tasks that demonstrate its dexterity and ambulatory ability. These include removing debris from a doorway, using a tool to break through a concrete panel, connecting a fire hose to a pipe and turning it on, and driving a vehicle at a disaster site. The competition, which began in 2012, will have its first trials in December.
Many of the teams in the challenge are creating fairly humanoid robots but RoboSimian, as its name implies, looks a bit more like an ape. And there is a reason for this: relying on four very flexible limbs, each of which has a three-fingered hand, the robot is much better suited to climbing and hanging, much like our Simian cousins. This makes it well-suited for the DARPA-set requirement of climbing a ladder, and will no doubt come in handy when the robot has to navigate difficult environments.
The demo video, featured below, shows the robots hands doing dextrous tasks as well as doing some pull ups. There’s also a computer renderings of what the final machine may look like. Check it out:
What is it about robots that manages to inspire us even as they creep us out? Somehow, we just can’t stop pushing the envelope to make them smarter, faster, and more versatile; even as we entertain fears that they might someday replace us. And at the forefront of this expanding research is the desire to create robots that can not only think for themselves, but also maintain and/or repair themselves.
Case in point, the new hexapod robot that was developed by researchers from Pierre-and-Marie-Curie University, in Paris. Built with survivability in mind, this robot is the first of its kind to be able to address structural damage, adapt, and carry on. In a world where robots can be very expensive, the ability to keep working despite the loss of a component is invaluable.
To do this, the hexapod uses what the team refers to as a T-resilience (the T standing for Transferability-based) algorithm. With six legs, the hexapod moves along quite at a steady 26 cm/s. But once it loses one its front legs, it manages only 8 cm/s. But after running 20 minutes’ worth of simulations and tests, the robot works out a new way of walking, and is able to more than double its speed and cover 18 cm/s.
Essential to this approach is that the robot is programmed with what amounts to an understanding of its ideal undamaged anatomy. Previously, roboticists believed that it was necessary for a robot to analyze its new gait to diagnose the damage and compensate accordingly. But the team argues that a robot can arrive at an answer more quickly by generating a number of possible alternatives based on an undamaged state, and then testing them.
The robot spends 20 minutes testing 25 alternatives, during which a ranging camera feeds data to a separate algorithm which works out the distance traveled. In this way the robot is able to compare its actual performance with its theoretical performance, finally settling for the closest match: a gait which recovers much of the lost speed.
This resilience could one day be a godsend for crew that rely on robots to survey disaster zones, conduct rescue operations, or deal with explosive devices. The ability to carry on without the need for repair not only ensures a better history of service, but makes sure that a task can be completed with subjecting repair crews to danger.
The team’s findings were released in a self-published paper entitled “Fast Damage Recovery in Robotics with the T-Resilience Algorithm”. And of course, the hexapod’s test run was caught on video:
And then there’s the RHex robot, a machine designed with versatility and performance in mind. Much like many robots in production today, it utilizes a six-foot (hexapod) configuration. But it is in how the RHex uses its appendages that set it apart, allowing for such athletic feats as long jumps, pull-ups, climbing stairs and even scaling walls.
This is all made possible by RHex’s six spinning appendages, which act as a sort of wheel-leg combination rather than traditional feet. These legs provide for a form of motion that exceeds standard locomotion, and allow the robot to go places others could not. The robot was created through the collaborative efforts of Aaron Johnson, an engineering graduate student at the University of Pennsylvania, and professor Daniel Koditschek at Penn State’s Kod*Lab.
Said Johnson of their robotic creation:
What we want is a robot that can go anywhere, even over terrain that might be broken and uneven. These latest jumps greatly expand the range of what this machine is capable of, as it can now jump onto or across obstacles that are bigger than it is.
Here too, the potential comes in the form of being able to mount rescue missions in rugged and hostile terrain. Thanks to its versatile range of motions, the RHex could easily be scaled into a larger robot that would be able to navigate rocky areas, collapsed buildings, and disaster zones with relative ease, and would have no trouble getting up inclined surfaces of hopping over gaps and holes.
And be sure to check out the video of the RHex in action. It’s like watching robot Parkour! Check it out:
Granted, we’re still a long way from the Nexus 6 or NS-5, but real advances are far more impressive than fictional representations. And with parallel developments taking place in the field of AI, it is clear that robots are going to be an integral part of our future. One can only hope its a happy, docile part. When it comes time for science fiction to give way to science fact, we could all do without certain cliches!
Robots have been making quite the stir in the news lately. And no, that’s not a delicious pun on the robotic bartender – aka. the Makr Shakr, it’s just a frank appraisal of the leap and bounds by which robots and their integration to society is proceeding. Between developing machines that can imitate human movements, human facial expressions, and carry out specialized tasks, it appears that we may actually be on the verge on a world where robots are a common feature.
Just a few days ago, DARPA and Boston Dynamics unveiled their most anthropomorphic robot to date – the Atlas Robot. And this came less than a month after the Global Future 2045 conference took place in Moscow, where Geminoid robot clones – so realistic that they were virtually indistinguishable from their human counterparts – were put on display. And yet, it seems that the Singularitarians and roboticists of the world were not yet finished for the season.
Now it appears that there is a robotic arm that is capable of performing another highly-specialized task: painting. Created by a team at the University of Konstanz in Germany, the E-David is capable of performing the artistic variety of painting, not the kind which involves spraying enamel onto car frames – something robots have been doing for decades, much to the chagrin of auto workers.
Granted, it is not capable of “artistic inspiration”, but instead takes a picture of what it wants to copy and takes it from there. What’s more, it e-David doesn’t require programming directions that tell it how to paint, relying instead on a concept known as “visual optimization” to make its own decisions. After each brush stroke, e-David takes a picture, and its software calculates where the next stroke needs to fall, what colors are needed, and whether it needs to be lighter or darker, etc.
In short, e-David can do the time-consuming and often monotonous task of reproducing original works of art, or cleaning them up, but cannot create someone all on its own. Now lets all join the artists of the world in breathing a collective sigh of relief. The team of university researchers described the e-David’s “process” in a release in which they stated:
We equipped a standard robot with all necessary means for painting. Five different brushes can be used, color can be selected from a repository with 24 colors, brushes can be cleaned, and colors can be distributed precisely on the canvas. The machine watches itself while painting and decides independently where to add new strokes. This way, paintings are created that are not completely defined by the programmer, but are the result of a visual optimization process.
While E-David isn’t the first robot capable of painting, it is in a class by itself when it comes to the quality of the images it creates. Much like the supercomputer Iamus that composed classical music which was performed by the London Symphony Orchestra and recorded on an album, it is impossible to tell when looking at the finished product if the paintings were crafted by hand or machine. An interesting twist on the Turing Test, I think!
What’s next? A robot that can compose pop songs? I don’t think I can stand another version of “Friday”! And be sure to enjoy this video of e-David at work:
Judgement Day has come early this year! At least that’s the impression I got when I took a look at this new DARPA prototype for a future robotic infantryman. With its anthropomorphic frame, servomotors and cables, sensor-clustered face, and the shining lights on its chest, this machine just screams Terminator! Yet surprisingly, it is being developed to help humans beings. Yeah, that’s what they said about Skynet, right before it nuked us!
Yes, this 6-foot, 330-pound robot, which was unveiled this past Thursday, was in fact designed as a testbed humanoid for disaster response. Designed to carry tools and tackle rough terrain, this robot – and those like it – are intended to operate in hazardous or disaster-stricken areas, assisting in rescue efforts and performing tasks that would ordinarily endanger the lives of human workers.
Funded by DARPA as part of their Robotics Challenge, the robot was developed by Boston Dynamics, the same people who brought you the AlphaDog – aka the Legged Squad Support System (LS3, pictured above) – and the Petman soldier robot. The former was developed as an all-terrain quadruped robot that could as an infantry-support vehicle by carrying a squad’s heavy ordinance over rough terrain.
The latter, like Atlas, was developed as testbed to see just how anthropomorphic a robot can be – i.e. whether or not it could move, run and jump with fluidity rather than awkward “robot” movements, and handle different surfaces. Some of you may recall seeing a video or two of it doing pushups and running on a treadmill back in 2011.
Alas, Atlas represents something vastly different and more complex than these other two machines. It was designed to not only walk and carry things, but can travel over rough terrain and climb using its hands and feet. Its head includes stereo cameras and a laser range finder to help it navigate its environment.
And, as Boston Dynamics claimed in a press release, the bot also possesses “sensate hands” that are capable of using human tools, and “28 hydraulically actuated degrees of freedom”. Its only weakness, at present, is the electrical power supply it is tethered to. But other than that, it is the most “human” robot – purely in terms physical capabilities – to date. Not only that, but it also looks pretty badass when seen in this full-profile pic, doesn’t it?
The DARPA Robotics Challenge is designed to help evolve machines that can cope with disasters and hazardous environments like nuclear power plant accidents. The seven teams currently in the challenge will get their own Atlas bot and then program it until December, when trials will be held at the Homestead Miami Speedway in Florida – where they will be presented with a series of challenges.
In the meantime, check out the video below of the Atlas robot as it demonstrates it full range of motion while busting a move! Then tell me if the robot is any less frightening to you. Can’t help but look at the full-length picture and imagine a plasma cannon in its hands, can you?
In a recent study, NASA shared a vision that sounds like something out of a science fiction novel. Basically, the plan calls for the creation of robots that could be sent to a nearby asteroid, assemble itself, and then begin mining the asteroid itself. The scientists behind this study say that not only will this be possible within a few generations of robotics, but will also pay for itself – a major concern when it comes to space travel.
A couple of factors are pointing to this, according to the researchers. One, private industry is willing and able to get involved, as attested to by Golden Spike, SpaceX and Planetary Resources. Second, advances in technologies such as 3-D printing are making off-world work more feasible, which can be seen with plans to manufacture a Moon base and “sintering”.
But also, humanity’s surveys of space resources – namely those located in the asteroid belt – have revealed that the elements needed to make rubber, plastic and alloys needed for machinery are there in abundance. NASA proposes that a robotic flotilla could mine these nearby space rocks, process the goods, and then ship them back to Earth.
Best of all, the pods being sent out would save on weight (and hence costs) by procuring all the resources and constructing the robots there. They caution the technology won’t be ready tomorrow, and more surveys will need to be done of nearby asteroids to figure out where to go next. There is, however, enough progress to see building blocks. As the agency stated in their research report:
Advances in robotics and additive manufacturing have become game-changing for the prospects of space industry. It has become feasible to bootstrap a self-sustaining, self-expanding industry at reasonably low cost…
Phil Metzger, a senior research physicist at NASA’s Kennedy Space Center, who led the study, went on to explain how the process is multi-tiered and would encompass several generations of progress:
Robots and machines would just make the metal and propellants for starters… The first generation of robots makes the second generation of hardware, except the comparatively lightweight electronics and motors that have to be sent up from Earth. It doesn’t matter how much the large structures weigh because you didn’t have to launch it.
A computer model in the study showed that in six generations of robotics, these machines will be able to construct themselves and operate without any need of materials from Earth.
At least two startups are likely to be on board with this optimistic appraisal. For example, Deep Space Industries and Planetary, both commercial space companies, have proposed asteroid mining ideas within the past year. And since then, Planetary Resources has also unveiled other projects such as a public space telescope, in part for surveying work and the sake of prospecting asteroids.
And this latest research report just takes thing a step farther. In addition to setting up autonomous 3D manufacturing operations on asteroids, these operations would be capable of setting themselves up and potentially upgrading themselves as time went on. And in the meantime, we could look forward to a growing and increasingly complex supply of manufactured products here on Earth.
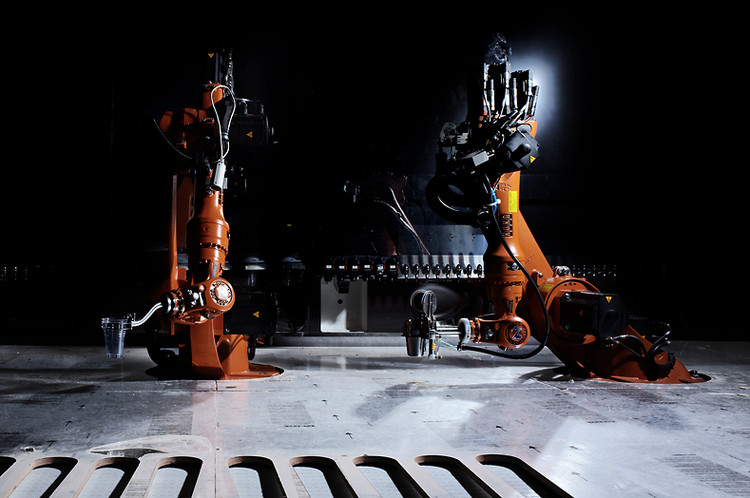
As if robotics weren’t advancing fast enough, what with robotic astronauts or androids that can be 3D printed, it seems that DARPA has developed a robotic hand that can perform complex, dextrous tasks. But to make matters worse, this particular robot can be cheaply produced. Up until now, cost has remained a factor in the creation of robotic limbs that are capable of matching human skill. But from now on, we could very well be seeing robots replacing skilled labor on all fronts!
As we’re all no doubt aware, one of the key differences between humans and other mammals is the use of tools. These not only allowed our earliest ancestors the ability to alter their environment and overcome their disadvantages when faced with larger, deadlier creatures. They also allowed homo sapiens as a species to gain the upper hand against other species of hominids, those who’s brains and hands were not as developed as our own.
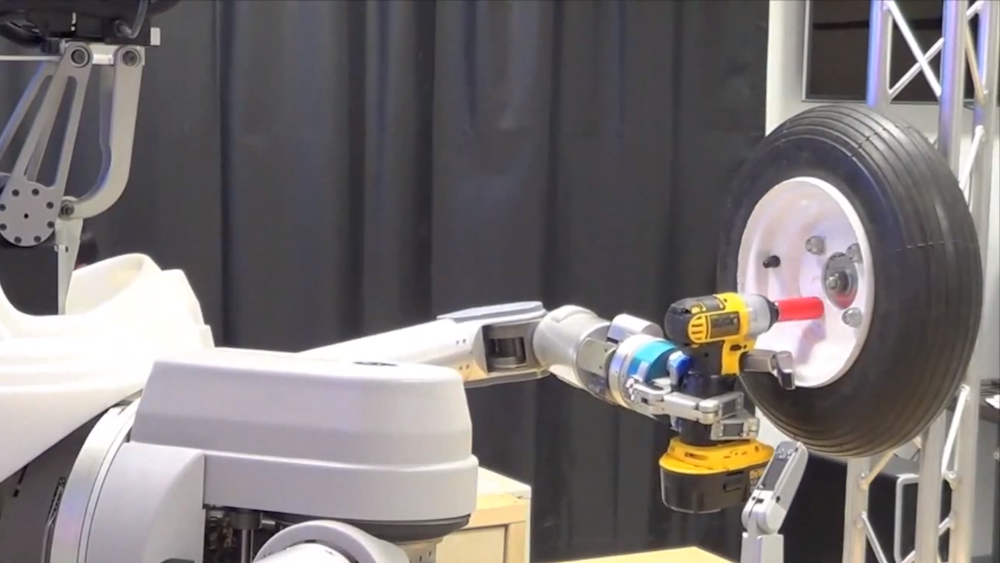
So what happens when a robot is capable of matching a human being when it comes to a complicated task – say, like changing a tire – and at a cost most businesses can afford? To add insult to injury, the robot was able to conduct this task using tools specifically designed for a human being. But of course, the purpose was not to demonstrate that a robot could replace a human worker, but that it was possible to create more dextrous prosthetics for the sake of replacing lost limbs.
Ordinarily, such machinery would run a person a good $10,000, but DARPA’s new design is estimated at a comparatively modest $3000. This was made possible by the use of consumer-grade tech in the construction process, such as cameras from cellphones. And in addition to being able to work with tools, the robot can perform more intricate maneuvers, such as handling an object as small as a set of tweezers.
However, DARPA was also quick to point out that the robot shown in the video featured below is actually an older model. Since its creation, they have set their sights on loftier goals than simple tool use, such as a robot that can identify and defuse Improvised Explosive Devices (IEDs). Much like many of their robotic projects, such as the Legged Squad Support System (LS3), this is part of DARPA’s commitment to developing robots that will assist future generations in the US army.
So if you’re a member of a pit crew, you can rest easy for now. You’re job is safe… for the moment. But if you’re a member of a bomb squad, you might be facing some robotic competition in the near future. Who knows, maybe that’s a good thing. No one likes to be replaced, but if you’re facing a ticking bomb, I think most people would be happier if the robot handled it!
And in the meantime, check out the video of the robotic hand in action:
My gratitude once again to Nicola Higgins for beating me to the punch yet again! I hope she doesn’t mind that I’m totally posting a separate article, but something like this is just too good to reblog! In what is sure to excite Singularitarians and Futurists and scare the holy bejeezus out of technophobes and those fearing the Robopocalypse, a new web-based artificial brain went online recently, allowing robots to share information and seek help whenever they need it.
It’s called Rapyuta (or the The RoboEarth Cloud Engine), a part of the European Robo Earth project that began in 2011 with the hope of standardizing the way robots perceive the human world. Basically, it is an online database that robots can consult in order to get information about their world and help them make sense of their experiences, post-activation.
The name Rapyuta is taken from the Japanese film by Hayao Miyazaki known as Castle in the Sky, and refers to a place where all the robots live. The project, which involves researchers at five separate European research labs, has produced the database as well as software that robot owners can upload to their machines so that they can connect to the system at any time.
You might say the “brain” is an expression of sympathy for robots, who are no doubt likely to find the world intimidating and confusing once they come online. Now, instead of every robot building up their own idiosyncratic catalog of how to deal with the objects and situations it encounters, Rapyuta would be the place they ask for help when confronted with a novel situation, place or thing.
In addition, the web-based service is able to do complicated computation on behalf of a robot. For example, if it needs to work out how to navigate a room, fold an item of clothing or understand human speech, it can simply do an online consultation rather than try to figure it out on its own. In addition, it is believed that robots will be cheaper thanks to this system since it will mean they won’t need to carry all their processing power on board.
Looking ahead, Mohanarajah Gajamohan, technical head of the project at the Swiss Federal Institute of Technology in Zurich, says that the designers believe the system could be particularly useful for drones, self-driving cars or other mobile robots who have to do a lot of number crunching just to get round.
Dr Heico Sandee, Robo Earth program manager at the Dutch University of Technology in Eindhoven, also highlighted the economic benefits of this new concept. “On-board computation reduces mobility and increases cost,” he said, adding that as wireless data speeds increase, more and more robotic thinking could be offloaded to the web.
But above all, the aim here is about integration. As robots become more and more common and we human beings are forced to live with them amongst us, there could be difficulties. Without access to such a database, those involved in the project and roboticists at large fear that machines will remain on production lines and never live easily alongside humans.
As for those who support and await the Technological Singularity, this could be one such means through which it is achieved. The idea of machines that are capable of network and constantly upgrade their software is a step in the direction of machines that are capable of self-assembling, evolving and upgrading themselves constantly, which will basically result in a rate of progress that we can currently predict.
But on the other side of the debate, there are those who say this smacks of a Skynet-like supercomputer that could provide machines with the means to network, grow smarter, and think of ways of overthrowing their human masters. While I don’t consider myself the technophobic sort, I can certainly see how this invention could be perceived that way.
Creating a means for robots to communicate and contribute to a growing sense of knowledge, effectively letting them take ownership of their own world, does seem kinda like the first step in creating a world where robots no longer need human handlers. Then again, if we’re going to be creating AI, we might want to consider treating them like sentient, dignified beings beforehand, and avoiding any “controversy” when they begin to demand them later.
Gotta admit, when it comes to technophobes and paranoiacs, this kind of stuff is certainly fertile territory! For more information on the Rapyuta Engine, simply click here. And may God help us all!
Twenty-five years ago, Los Angeles magazine envisioned what the world would look like in the current decade. And unlike Blade Runner, they avoided the cool but standard science fiction allegories – like massive billboards, flying cars and sentient robots – and went straight for the things that seemed entirely possible by contemporary standards.
The cover story of the magazine’s April 3, 1988 edition showed a futuristic downtown L.A. crisscrossed with electrically charged, multi-tiered freeways permeated by self-driving cars. The article itself then imagined a day in the life of the fictional Morrow family of the L.A. suburb Granada Hills, as “profiled” by the magazine in 2013 by science fiction writer Nicole Yorkin.
Ironically, the magazine did not envision that it would one day go out of business, or that print media would one day be lurching towards extinction. Nevertheless, the fictional article and the world it detailed were interesting reading. Little wonder then why, earlier this month, the LA Times along with an engineering class at USC, revisited the archives to assess what it predicted correctly versus incorrectly.
Together, professor Jerry Lockenour and his class made a list of the hits and misses, and what they found paints a very interesting picture of how we predict the future and how its realization so often differs from what we expect. Of the major predictions to be found in LA of the 2013, as well as in the lives of the Morrow family (get it?), here is what they got right:
Smart-Houses: In the article, the Morrows are said to begin every morning when their “Smart House” automatically turns on. This consists of all the appliances activating and preparing them breakfast, and no doubt turning on all the environmental controls and opening the shades to get the temperature and ambient lighting just right.
While this isn’t the norm for the American family yet, the past few years have proved a turning point for home devices hooking up with the Internet, to become more programmable and serve our daily needs. And plans are well under way to find a means of networking them all together so they function as one “smart” unit.
Self-Driving Cars: The writers of the article predicted that by 2013, cars would come standard with computers that control most of the settings, along with GPS systems for navigation. They also predict self-driving cars, which Google and Chevy are busy working on. In addition to using clean, alternative energy sources, these cars are expected to be able t0 self-drive, much in the same way a pilot puts their plane on auto-pilot. Drivers will also be able to summon the cars to their location, connect wirelessly to the internet, and download apps and updates to keep their software current.
But of course, they got a few things wrong as well. Here they are, the blots on their predictive record:
Homeprinted newspapers: The article also predicts that each morning the Morrows would begin their day with a freshly printed newspaper, as rendered by their laser-jet printer. These would be tailor-made, automatically selecting the latest news feeds that would be of most interest to them. What this failed to anticipate was the rise in e-media and the decline of printed media, though hardly anyone would fault them for this. While news has certainly gotten more personal, the use of tablets, ereaders and smartphones is the way the majority of people now read their selected news.
Robot servants and pets: In what must have seemed like a realistic prediction, but which now comes across as a sci-fi cliche, the Morrows’ home was also supposed to come equipped with a robotic servant that had a southern accent. The family’s son was also greeted every morning by a robot dog that would come to play with him. While we are certainly not there yet, the concept of anthropomorphic robot assistants is becoming more real every day. Consider, for example, the Kenshiro robot (pictured at right), the 3D printed android, or the proposed Roboy, the Swiss-made robotic child. With all of these in the works, a robotic servant or pet doesn’t seem so far-fetched does it?
Summary:
Between these four major predictions and which came to be true, we can see that the future is not such an easy thing to predict. In addition to always being in motion, and subject to acceleration, slowing and sudden changes, the size and shape of it can be very difficult to pin down. No one can say for sure what will be realized and when, or if any of the things we currently take for granted will even be here tomorrow.
For instance, during the 1960’s and 70’s, it was common practice for futurists and scientists to anticipate that the space race, which had culminated with humans setting foot on the moon in 1969, would continue into the future, and that humanity would be seeing manned outposts on the moon by and commercial space flight by 1999. No one at the time could foresee that a more restrictive budget environment, plus numerous disasters and a thawing of the Cold War, would slow things down in that respect.
In addition, most predictions that took place before the 1980’s completely failed to predict the massive revolution caused by miniaturization and the explosion in digital technology. Many futurist outlooks at the time predicted the rise in AI, but took it for granted that computers would still be the size of a desk and require entire rooms dedicated to their processors. The idea of a computer that could fit on top of a desk, let alone on your lap or in the palm of your hand, must have seemed farfetched.
What’s more, few could predict the rise of the internet before the late 1980’s, or what the realization of “cyberspace” would even look like. Whereas writer’s like William Gibson not only predicted but coined the term, he and others seemed to think that interfacing with it would be a matter of cool neon-graphics and avatars, not the clean, page and site sort of interface which it came to be.
And even he failed to predict the rise of such things as email, online shopping, social media and the million other ways the internet is tailored to suit the average person and their daily needs. When it comes right down to it, it is not a dangerous domain permeated by freelance hacker “jockeys” and mega-corporations with their hostile counter-intrusion viruses (aka. Black ICE). Nor is it the social utopia promoting open dialogue and learning that men like Bill Gates and Al Gore predicted it would be in the 1990’s. If anything, it is an libertarian economic and social forum that is more democratic and anarchistic than anyone could have ever predicted.
But of course, that’s just one of many predictions that came about that altered how we see things to come. As a whole, the entire thing has come to be known for being full of shocks and surprises, as well as some familiar faces. In short, the future is an open sea, and there’s no telling which way the winds will blow, or what ships will make it to port ahead of others. All we can do is wait and see, and hopefully trust in our abilities to make good decisions along the way. And of course, the occasional retrospective and issue congratulations for the things we managed to get right doesn’t hurt either!

 The robotics company of Boston Dynamics has been doing some pretty impressive things with robots lately. Just last year, they unveiled the Cheetah, the robotics company set a new land speed record with their four-footed robot named Cheetah. As part of DARPA’s Maximum Mobility and Manipulation program, the robotic feline demonstrated the ability to run at a speed of 45.06 km/h (28 mph).
The robotics company of Boston Dynamics has been doing some pretty impressive things with robots lately. Just last year, they unveiled the Cheetah, the robotics company set a new land speed record with their four-footed robot named Cheetah. As part of DARPA’s Maximum Mobility and Manipulation program, the robotic feline demonstrated the ability to run at a speed of 45.06 km/h (28 mph).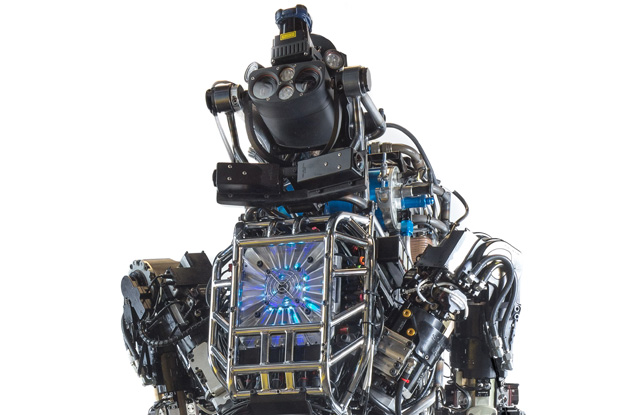 And now, they’ve unveiled an entirely new breed of robot, one that is capable of running fast on any kind of terrain. It’s known as the WildCat, a four-legged machine that builds on the world of the Legged Squad Support System (LS3) that seeks to create a robot that can support military units in the field, carrying their heavy equipment and supplies over rugged terrain and be operated by remote.
And now, they’ve unveiled an entirely new breed of robot, one that is capable of running fast on any kind of terrain. It’s known as the WildCat, a four-legged machine that builds on the world of the Legged Squad Support System (LS3) that seeks to create a robot that can support military units in the field, carrying their heavy equipment and supplies over rugged terrain and be operated by remote. Following in the footsteps of its four-legged and two-legged progeny, the WildCat represents a coming era of biomimetic machinery that seeks to accomplish impressive physical feats by imitating biology. Whereas the Atlas is designed to be capable of doing anything the human form can – traversing difficult terrain, surveying and inspecting, and using complex tools – the Cheetah, LS3, and WildCat draw their inspiration from nature’s best hunters and speed runners.
Following in the footsteps of its four-legged and two-legged progeny, the WildCat represents a coming era of biomimetic machinery that seeks to accomplish impressive physical feats by imitating biology. Whereas the Atlas is designed to be capable of doing anything the human form can – traversing difficult terrain, surveying and inspecting, and using complex tools – the Cheetah, LS3, and WildCat draw their inspiration from nature’s best hunters and speed runners. In the end, it demonstrates that anthropomorphism isn’t the only source of drive when it comes to developing scary and potential doomsday-bating robots! And in the meantime, be sure to enjoy these videos of these various impressive, scary, and very cool robots in action:
In the end, it demonstrates that anthropomorphism isn’t the only source of drive when it comes to developing scary and potential doomsday-bating robots! And in the meantime, be sure to enjoy these videos of these various impressive, scary, and very cool robots in action: