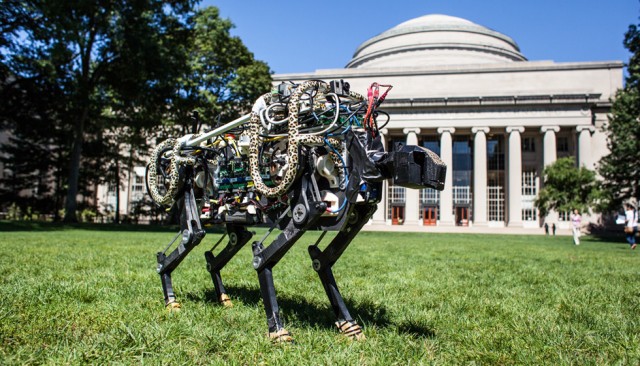
 There have been lots of high-speed bio-inspired robots in recent years, as exemplified by Boston Dynamics WildCat. But MIT’s Cheetah robot, which made its big debut earlier this month, is in a class by itself. In addition to being able to run at impressive speeds, bound, and jump over obstacles, this particular biomimetic robot is also being battery-and-motor driven rather than by a gasoline engine and hydraulics, and can function untethered (i.e. not connected to a power source).
There have been lots of high-speed bio-inspired robots in recent years, as exemplified by Boston Dynamics WildCat. But MIT’s Cheetah robot, which made its big debut earlier this month, is in a class by itself. In addition to being able to run at impressive speeds, bound, and jump over obstacles, this particular biomimetic robot is also being battery-and-motor driven rather than by a gasoline engine and hydraulics, and can function untethered (i.e. not connected to a power source).
While gasoline-powered robots are still very much bio-inspired, they are dependent on sheer power to try and match the force and speed of their flesh-and-blood counterparts. They’re also pretty noisy, as the demonstration of the WildCat certainly showed (video below). MIT’s Cheetah takes the alternate route of applying less power but doing so more efficiently, more closely mimicking the musculoskeletal system of a living creature.
 This is not only a reversal on contemporary robotics, but a break from history. Historically, to make a robot run faster, engineers made the legs move faster. The alternative is to keep the same kind of frequency, but to push down harder at the ground with each step. As MIT’s Sangbae Kim explained:
This is not only a reversal on contemporary robotics, but a break from history. Historically, to make a robot run faster, engineers made the legs move faster. The alternative is to keep the same kind of frequency, but to push down harder at the ground with each step. As MIT’s Sangbae Kim explained:
Our robot can be silent and as efficient as animals. The only things you hear are the feet hitting the ground… Many sprinters, like Usain Bolt, don’t cycle their legs really fast. They actually increase their stride length by pushing downward harder and increasing their ground force, so they can fly more while keeping the same frequency.
MIT’s Cheetah uses much the same approach as a sprinter, combining custom-designed high-torque-density electric motors made at MIT with amplifiers that control the motors (also a custom MIT job). These two technologies, combined with a bio-inspired leg, allow the Cheetah to apply exactly the right amount of force to successfully bound across the ground and navigate obstacles without falling over.
 When it wants to jump over an obstacle, it simply pushes down harder; and as you can see from the video below, the results speak for themselves. For now, the Cheetah can run untethered at around 16 km/h (10 mph) across grass, and hurdle over obstacles up to 33 centimeters high. The Cheetah currently bounds – a fairly simple gait where the front and rear legs move almost in unison – but galloping, where all four legs move asymmetrically, is the ultimate goal.
When it wants to jump over an obstacle, it simply pushes down harder; and as you can see from the video below, the results speak for themselves. For now, the Cheetah can run untethered at around 16 km/h (10 mph) across grass, and hurdle over obstacles up to 33 centimeters high. The Cheetah currently bounds – a fairly simple gait where the front and rear legs move almost in unison – but galloping, where all four legs move asymmetrically, is the ultimate goal.
With a new gait, and a little byte surgery to the control algorithms, MIT hopes that the current Cheetah can hit speeds of up to 48 km/h (30 mph), which would make it the fastest untethered quadruped robot in the world. While this is still a good deal slower than the real thing – real cheetah’s can run up to 60 km/h (37 mph) – it will certainly constitute another big step for biomimetics and robotics.
Be sure to check out the video of the Cheetah’s test, and see how it differs from the Boston Dynamics/DARPA’s WildCat’s tests from October of last year:
Source: extremetech.com


 In true science fiction fashion, the SPHERES project began in 2000 after MIT professor David W. Miller was inspired by the “Star Wars” scene where Luke Skywalker is being trained in handling a lightsaber by a small flying robot. Miller asked his students to create a similar robot for the aerospace Industry. Their creations were then sent to the ISS in 2006, where they have been ever since.
In true science fiction fashion, the SPHERES project began in 2000 after MIT professor David W. Miller was inspired by the “Star Wars” scene where Luke Skywalker is being trained in handling a lightsaber by a small flying robot. Miller asked his students to create a similar robot for the aerospace Industry. Their creations were then sent to the ISS in 2006, where they have been ever since.

 This tool, which was created in 1994, instructs search engines and other automated bots to avoid crawling certain pages or directories of a website. The industry has done a remarkable job staying true to the simple text file in the two decades since; Google, Bing, and Yahoo still obey its directives. The changes they uploaded read like this, just in case you’re planning on adding your name to the “disallow” list:
This tool, which was created in 1994, instructs search engines and other automated bots to avoid crawling certain pages or directories of a website. The industry has done a remarkable job staying true to the simple text file in the two decades since; Google, Bing, and Yahoo still obey its directives. The changes they uploaded read like this, just in case you’re planning on adding your name to the “disallow” list:
 Basically, as Google’s senior VP of technical infrastructure Urs Hölze spoke about their cloud platform, the unidentified man stood up and began screaming “You all work for a totalitarian company that builds machines that kill people!” As you can see from the video below, Hölze did his best to take the interruptions in stride and continued with the presentation. The protestor was later escorted out by security.
Basically, as Google’s senior VP of technical infrastructure Urs Hölze spoke about their cloud platform, the unidentified man stood up and began screaming “You all work for a totalitarian company that builds machines that kill people!” As you can see from the video below, Hölze did his best to take the interruptions in stride and continued with the presentation. The protestor was later escorted out by security.


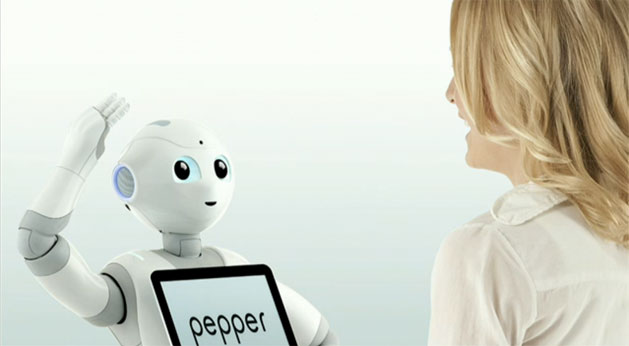
 Aldebaran CEO Bruno Maisonnier claims that robots that can recognize human emotion will change the way we live and communicate. And this is certainly a big step towards getting robots into our daily lives, at least if you live in Japan (the only place Pepper will be available for the time being). He also believes this is the start of a “robotic revolution” where robotic household companions that can understand and interact with their human owners will become the norm.
Aldebaran CEO Bruno Maisonnier claims that robots that can recognize human emotion will change the way we live and communicate. And this is certainly a big step towards getting robots into our daily lives, at least if you live in Japan (the only place Pepper will be available for the time being). He also believes this is the start of a “robotic revolution” where robotic household companions that can understand and interact with their human owners will become the norm. In a hilarious appearance on “Last Week Tonight” – John Oliver’s HBO show – guest Stephen Hawking spoke about some rather interesting concepts. Among these were the concepts of “imaginary time” and, more interestingly, artificial intelligence. And much to the surprise of Oliver, and perhaps more than a few viewers, Hawking’s was not too keen on the idea of the latter. In fact, his predictions were just a tad bit dire.
In a hilarious appearance on “Last Week Tonight” – John Oliver’s HBO show – guest Stephen Hawking spoke about some rather interesting concepts. Among these were the concepts of “imaginary time” and, more interestingly, artificial intelligence. And much to the surprise of Oliver, and perhaps more than a few viewers, Hawking’s was not too keen on the idea of the latter. In fact, his predictions were just a tad bit dire.
 At worst, this could lead to the machines concluding that humanity is no longer necessary. At best, it would lead to an earthly utopia where machines address all our worries. But in all likelihood, it will lead to a future where the pace of technological change will impossible to predict. As history has repeatedly shown, technological change brings with it all kinds of social and political upheaval. If it becomes a runaway effect, humanity will find it impossible to keep up.
At worst, this could lead to the machines concluding that humanity is no longer necessary. At best, it would lead to an earthly utopia where machines address all our worries. But in all likelihood, it will lead to a future where the pace of technological change will impossible to predict. As history has repeatedly shown, technological change brings with it all kinds of social and political upheaval. If it becomes a runaway effect, humanity will find it impossible to keep up.
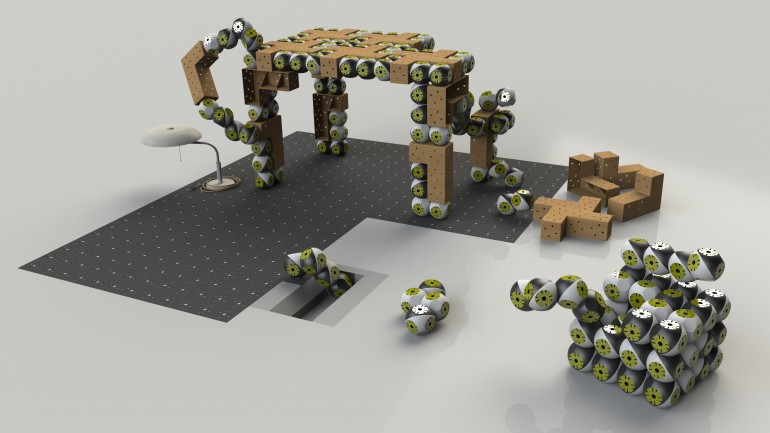
 Like LEGO bricks, Roombots can be stacked upon each other to create various structures and/or combined with furniture and other objects, changing not only their shape, but also and functionality. For instance, a person lying down on a Roombot bed could slowly be moved into a seated position, or a table could scoot over to a corner or tilt itself to help a book slide into a person’s hands. The team has solved a number of significant milestones, such as the having the Roombots move freely, to bring all this multi-functionality closer.
Like LEGO bricks, Roombots can be stacked upon each other to create various structures and/or combined with furniture and other objects, changing not only their shape, but also and functionality. For instance, a person lying down on a Roombot bed could slowly be moved into a seated position, or a table could scoot over to a corner or tilt itself to help a book slide into a person’s hands. The team has solved a number of significant milestones, such as the having the Roombots move freely, to bring all this multi-functionality closer. The Roombots can even climb up a wall or over a step, when the surface is outfitted with connector plates. They’re are also capable of picking up connector plates and arranging them to form, say, a table’s surface. Massimo Vespignani, a PhD student at BioRob, explained the purpose of this design and the advantages in a recent interview with Gizmag:
The Roombots can even climb up a wall or over a step, when the surface is outfitted with connector plates. They’re are also capable of picking up connector plates and arranging them to form, say, a table’s surface. Massimo Vespignani, a PhD student at BioRob, explained the purpose of this design and the advantages in a recent interview with Gizmag: The range of applications for these kind of robotics is virtually infinite. For example, as seen in the video below, a series of Roombots as feet on a table that not only let it move around the room and come to the owner, but adjust its height as well. Auke Ijspeert, head of the Biorob, envisions that this type of customization could be used for physically challenged people who could greatly benefit from furniture that adapts to their needs and movements.
The range of applications for these kind of robotics is virtually infinite. For example, as seen in the video below, a series of Roombots as feet on a table that not only let it move around the room and come to the owner, but adjust its height as well. Auke Ijspeert, head of the Biorob, envisions that this type of customization could be used for physically challenged people who could greatly benefit from furniture that adapts to their needs and movements.